
Electric Motors: Energy Efficiency Reference Guide
Table of contents
- Introduction
- Motor Classification
- Operating Principles
- AC Motors
- DC Motors
- Advanced Motors
- Motor Selection
- Motor Controls
- Maintenance
- Repair or Replace?
- High Efficiency Retrofit
- Recommended Web Links
- Glossary
- Bibliography
Introduction
A world without electric motors is difficult to imagine. From the tiniest motor found in a quartz watch to a million-plus horsepower motor powering a ship, motors are used in many diverse applications.
There are a multitude of motor types to choose from. Each has its own unique characteristics, making one motor type a better choice for an application than another.
This guide provides an overview of the major types of electric motors available today, including advanced motor technologies. It is not intended to turn the reader into a motor expert, but rather to serve as a concise stand-alone reference with emphasis on energy efficiency.
The basis for this guide is derived from the Ontario Hydro Motors Guide 3rd Edition (Ref. 1) and as such the authors of this guide wish to acknowledge the contribution of this work. That said, the guide has been thoroughly updated and reorganized with the latest in motor developments and related information.
This guide is intended for both the novice and the experienced user. Some motor theory is provided along with equations, such as calculation of torque and horsepower. However, the reader only needs to delve as deeply as they wish. Topics covered in this guide include basic theory, motor types, applications, control equipment and economics.
Both direct current (DC) and alternating current (AC) motor types are presented. The characteristics of each are discussed along with typical applications. Some motors are noted as poor choices for certain applications.
Proper motor maintenance is essential in ensuring long term reliability and performance. Motor efficiency is very important and is emphasized in this guide. Lifetime energy costs for high usage motors will exceed the original purchase price many times over. For some motors, the small incremental cost to buy a more energy efficient motor is easily justified. Using simple decision tools, the reader will learn how to decide whether it is better to replace rather than repair a failed motor.
“Rules of thumb,” examples and other anecdotal commentary are sprinkled throughout the text. These commentaries are formatted in an italic font, as are the equations.
Finally, links to websites for the latest in motor programs and knowledge bases are included at the end of this guide.
Motor Classification
An electric motor is a device which converts electrical energy into kinetic energy (i.e. motion).
Most motors described in this guide spin on an axis, but there are also specialty motors that move linearly. All motors are either alternating current (AC) or direct current (DC), but a few can operate on both (See Figure 2-1). The following lists the most common motors in use today. Each motor type has unique characteristics that make it suitable to particular applications.
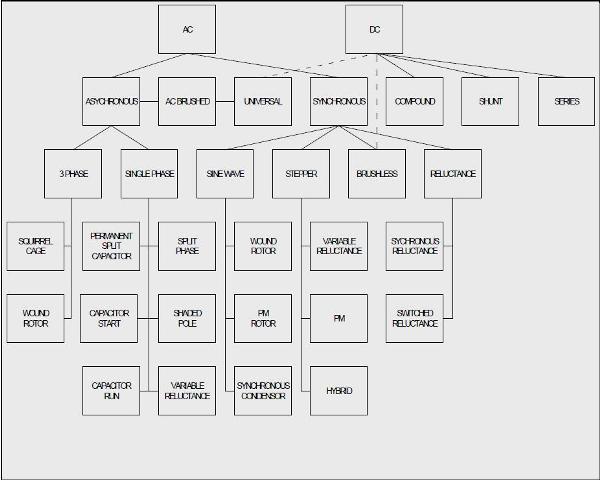
Figure 2-1: Motor Family Tree
Text version - Figure 2-1
- Alternating Current (AC) Motors
- Asychronous
- 3 phase
- Squirrel cage
- Wound rotor
- Single phase
- Permanent split capacitor
- Split phase
- Capacitor start
- Shaded pole
- Capacitor run
- Variable reluctance
- 3 phase
- AC Brushed
- Universal
- Synchronous
- Sine wave
- Wound rotor
- PM rotor
- Synchronous condensor
- Stepper
- Variable reluctance
- PM
- Hybrid
- Brushless
- Reluctance
- Synchronous reluctance
- Switched reluctance
- Sine wave
- Asychronous
- Direct Current Motors
- Universal
- Brushless
- Compound
- Shunt
- Series
Alternating Current (AC) Motors
AC motors include 3-phase and single phase types.
3-phase AC induction motors are the most widely used motors in industrial and commercial applications. They are divided into two sub-categories:
- Squirrel cage motors
- Wound rotor motors
3-phase Synchronous motors are most commonly used in very large industrial applications or where exact speed is required.
Single phase induction motors are used where three phase power is not available; typically in residential, commercial and agricultural applications. They are also used in applications with power requirements below 1 horsepower (HP). The main sub-categories include:
- Split phase
- Capacitor run
- Capacitor start
- Capacitor start - capacitor run
- Shaded pole
- Universal motors
Universal motors are mostly operated on AC power, but they can operate on either AC or DC. Tools and appliances are among the most frequent applications.
DC motors are often used in applications where precise speed control is required. They are divided into three sub-categories:
- Series
- Shunt
- Compound
Advanced motors have been developed in recent years, a number of which do not neatly fall within traditional motor classifications. They are typically used in OEM applications. Examples include:
- Electronically commutated motors
- Switched reluctance
Operating Principles
Major Parts
All motors have two basic parts:
- The STATOR (stationary part)
- The ROTOR (rotating part)
The design and fabrication of these two components determines the classification and characteristics of the motor. Additional components (e.g. brushes, slip rings, bearings, fans, capacitors, centrifugal switches, etc.) may also be unique to a particular type of motor.
Operation
The motors described in this guide all operate on the principle of electromagnetism. Other motors do exist that operate on electrostatic and Piezoelectric principles, but they are less common.
In electric motors, the magnitude of the force varies directly with the strength of the magnetic field and the amount of current flowing in the conductor (Figure 3-1).
Figure 3-1: Force on a Conductor in a Magnetic Field
F = ILB , where
F - Force (newtons)
I - Current (Amperes)
L - Length (metres)
B - Magnetic Flux (webers/m²)
In general, the rotor of an electric motor lies within a magnetic field created by the stator. The magnetic field induces a current within the rotor, and the resultant force caused by the magnetic fields in the stator and rotor (and thus torque) causes it to turn.
Motor Power and Torque
The nameplate on electric motors expresses the mechanical power rating in either horsepower or kilowatts.

Two important factors that determine mechanical power output are torque and speed.
Torque is a measure of force that tends to produce a rotation. It is often stated in pound-feet or Newton-metres.
To better understand the concept of torque, consider a large one foot long wrench being used to remove a nut (See Figure 3-2). If one applies 2 pounds of force at the end of this wrench, the torque would be 2 pound-feet. Until the nut starts to turn, no work is actually being performed. When the nut actually starts to turn, work is being performed. Assuming the same force continues to be applied to the wrench handle, the power is essentially the rotational speed times the torque applied.
Figure 3-2: Torque Example
Motor speed is commonly stated in revolutions per minute (RPM).
Motor horsepower is defined as the rotational speed of the motor multiplied by the torque.

The slower the motor operates the more torque it must produce to deliver the same power output. To withstand the greater torque, lower speed motors need stronger components and are generally larger, heavier and more expensive than those of higher speed motors of the same power rating.
There is sometimes confusion with the concept of torque and speed with horsepower. To illustrate the difference, consider the starting motor for an automobile. This specialty motor is designed for high torque but relatively low horsepower. Its sole purpose is to slowly turn the car engine to get it started. Conversely, the motor in a small fan rotates at high speed, but is easily stopped. The latter motor produces low torque. A final example is a 3 HP table saw motor. Shoving a piece of wood into the spinning blade will barely slow the motor down as the motor combines both speed and torque for the application.
Torque-Speed Characteristics of Motors
Torque produced by a motor typically varies with speed.
Each motor type has its own torque speed relationship which when plotted as torque vs. speed helps in the selection process (Figure 3-3).
Figure 3-3: Typical Torque-Speed Graph
Some important points found on a torque-speed graph include:
- Starting torque - the torque produced at zero speed. If the motor is to turn a load that is difficult to start (a high inertia load) one would choose a motor with high starting torque.
- Pull-up torque - the minimum torque produced during acceleration from standstill to operating speed. This may be critical for an application that needs power to go through some temporary barriers before achieving the working level output.
- Breakdown torque - the maximum torque that the motor can produce before stalling.
- Full load torque (also braking torque) - the torque produced at full load speed that gives the rated output of the motor. At this point the torque times the speed equals the nameplate horsepower rating.
AC Motors
A common feature of all AC motors is a rotating magnetic field produced by the stator windings.
This concept can be illustrated for three phase motors by considering three coils placed equally around the rotor. Each coil is connected to one phase of a three phase power supply (Figure 4-1).
Figure 4-1: Development of a Rotating Magnetic Field
Figure 4-2: Resulting Fields
The current through each coil varies sinusoidal with time, 120o out of phase with the other coils. This means that the current in coil B is delayed by 1/3 of a period from that in A, and the current in coil C is delayed 1/3 of a period from that in B (Figure 4-2).
The rotor sees the net rotating magnetic field created by the three coils and rotates, creating the torque on the motor drive shaft. This field rotates either clockwise or counter clockwise, depending on the order of the phases connected to the motor.
Reversing a 3-phase motor's direction is simply achieved by changing the connection order of two of the three conductors.
The rotating field speed depends on the number of magnetic poles in the stator and is referred to as the synchronous speed.

Frequency refers to the power supply frequency (e.g. 60 Hz).
The number of magnetic poles (or simply poles) is the principal design factor affecting speed in AC motors.
3-Phase Induction Motors
The rotor of an induction motor does not rotate at synchronous speed or the speed of the magnetic field of the stator, but lags slightly. This lag is usually expressed as a percentage of the synchronous speed called "slip." Motor slip is the result of the interaction between the magnetic field of the stator and the magnetic field resultant from the induced currents flowing in the rotor. The rotor bars cut through the magnetic lines of force resulting in useful torque being produced. As the motor slows down (i.e. slip increases) when load is added, more torque is created.

3-phase induction motors are very robust and reliable and are the most common type of motor in use.
Unfortunately, power factor tends to be poor for reduced loads. This is due to the current that is supplied to just maintain magnetic field.
Squirrel Cage Motors
The rotor of a squirrel cage motor is made of conductive bars that are parallel to the shaft and short circuited by the end rings in which they are physically supported (Figure 4-3).
Figure 4-3: Squirrel Cage
Bar size, shape and resistance significantly influence torque-speed characteristics. A break in a rotor bar or end ring connection can lead to a more serious condition including high frequency vibrations and even motor failure.
In order to facilitate the selection of motors, NEMA (National Electrical Manufacturers Association) has assigned letter designations A, B, C and D to describe standard torque-speed design characteristics of squirrel cage motors up to 200 HP (Table 4 1 & Figure 4-4).
| Design Type |
Starting Torque |
Starting Current |
Breakdown Torque |
Full Load Slip |
Typical Applications |
|---|---|---|---|---|---|
| A Seldom used |
normal | high | high | <5% | machine tools, fans, pumps |
| B | normal | normal | normal | <5% | same as A |
| C | high | normal | low | <5% | compressors, crushers, conveyors |
| D | very high | low | n/a | >5% | punch presses, high inertial loads elevators |
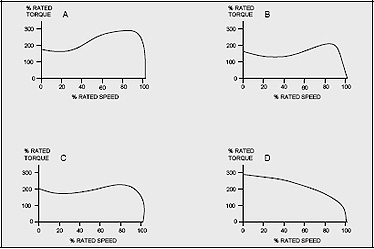
Figure 4-4: Torque-Speed Graphs of Design A, B, C, D Motors
Design type B is the most common and suits the majority of motor applications.
Design A motors are not generally specified today due to the high starting current. Design B motors should be specified instead.
Motors are also referred to as being general, definite or special purpose.
A general purpose motor is any motor which is designed in standard ratings, such as those specified in the National Electrical Manufacturers Association (NEMA) Standards Publication MG1-1993, paragraph 14.02.
A definite purpose motor is any motor designed in standard ratings with standard operating characteristics or standard mechanical construction for use under service conditions other than usual, such as those specified in NEMA Standards Publication MG1-1993.
A special purpose motor is any motor (other than a general purpose motor or definite purpose motor) which has special operating characteristics or special mechanical construction (or both) designed for a particular application. Motors over 500 HP are usually considered special purpose rather than general purpose, and are designed for the specific application.
Wound Rotor Induction Motor
The wound rotor induction motor operates on the same principles as the squirrel cage motor, but differs in the construction of the rotor. Instead of shorted bars, the rotor is made up of windings which terminate at slip rings on the shaft.
This type of motor is used in special applications where a high starting torque is required. Connection of external resistance to the rotor circuit via the slip rings permits variation of motor torque-speed characteristics (Figure 4-5 & Figure 4-6). After starting, the slip rings are shorted together.
Shorting the external connection results in operation similar to squirrel cage motors.
Figure 4-5: Wound Rotor Induction Motor
Speed range variation of about 5:1 can be achieved by adding external resistance to the rotor circuit; however, this is at the expense of electrical efficiency unless a slip energy recovery circuit is used
Figure 4-6: Wound Rotor Torque-Speed Graph for Various External Resistances
The maximum torque that a wound rotor motor can produce is determined by the design of its rotor, but the speed at which this torque is developed depends on external rotor resistance.
Each wound rotor design has a family of torque-speed curves that correspond to various values of external rotor resistance.
Single Phase Induction Motors
When a single phase induction motor is running it develops a rotating magnetic field, but before the rotor begins to turn, the stator produces only a pulsating stationary field.
To produce a rotating field, and thus a starting torque, an auxiliary starting winding is placed at right angles to the main stator winding so that the currents through them are out of phase by 90o (1/4 of a period in time). This places the magnetic fields 90oout of alignment. As a result, the rotor wants to align the magnetic poles, which creates a starting torque. The physical placement of the start winding and its relative polarity to the main winding results in the motor consistently turning in one direction when started. Once the motor has started, the auxiliary winding is often removed from the circuit by a centrifugal switch.
A failed start winding circuit will result in a motor that makes a low humming sound and will start in either direction by carefully providing a slight spin by hand.
Single phase induction motors are used in applications where three phase power is not available, and are generally in the fractional horsepower to 10 HP range. Larger than 10 HP single phase motors are possible and are usually matched with power electronics to limit starting currents which would be very high otherwise.
| Motor Type | Starting Torque | Efficiency | Application |
|---|---|---|---|
| Shaded Pole | Low | Low | Direct Drive Fans |
| Split Phase | Low | Medium | Direct Drive Fans, Centrifugal Pumps, Air and Refrigeration Compressors |
| Medium | Medium | Belted Fans, Air and Refrigeration Compressors, Major Appliances | |
| Capacitor Start | Medium | Medium | Belted Fans, Compressors, Centrifugal Pumps, Industrial, Farm, Major Appliances, Commercial Appliances, Business Equipment |
| High | Medium | Positive Displacement Pumps, Air and Refrigeration Compressors. | |
| Capacitor Start / Run | Medium | High | Belted Fans, Centrifugal Pumps |
| High | High | Positive Displacement Pumps, Air and Refrigeration Compressors, Industrial, Farm, Major Appliances, Commercial Appliances, Business Equipment | |
| Permanent Split Capacitor | Low | High | Direct Drive Fans, Refrigeration Compressor, Business Equipment |
Split Phase Motors
Split phase motors use a starting winding with a different resistance/reactance ratio than that of the main stator winding to produce the phase difference required for starting (Figure 4 7).
The phase difference is not the desired 90°, and the magnetic fields are not equal. This results in a lower starting torque than other motor designs.
Figure 4-7: Split Phase Motor
Split phase motor starting torque, however, is sufficient for many applications such as refrigerated display case circulation fans and some power tools (e.g. drill press). This type of motor is cheap to produce and is therefore a favourite in OEM products. Typical sizes range up to about 1/2 HP.
Capacitor Motors
Many single phase motors use a capacitor in series with one of the stator windings to optimize the field phase difference for starting. Capacitive current leads voltage by 90o. Adding capacitance causes a phase shift in one winding relative to the other. The result is a higher starting torque than a split phase motor can produce.
Capacitor motors are used in high starting torque applications such as compressors and air conditioners. Typical sizes range up to about 10 HP.
Capacitor Run Motor
Capacitor run motors use a capacitor permanently connected in series with one of the start windings, to achieve a compromise between good starting torque and good running characteristics (Figure 4-8). This design is lower in cost than other capacitor motors that incorporate capacitor switching systems.
These motors achieve better starting torque and running characteristics than a split phase motor and are sometimes called permanent split capacitor (PSC) motors.
New furnace fan motors sometimes use capacitor run motors.
Figure 4-8: Capacitor Run Motor
Capacitor Start Motor
In capacitor start motors, a capacitor connected in series with the starting winding is sized to maximize starting torque (Figure 4-9).
Figure 4-9: Capacitor Start Motor
The starting winding is removed from the circuit by a centrifugal switch or electronic relay when the motor reaches running speed. Starting torque is higher than for capacitor run motors, with running performance similar to a split phase motor.
Capacitor Start - Capacitor Run Motors
This design uses a capacitor optimized for running characteristics in series with the main stator winding (Figure 4-10). A second capacitor in series with the starting winding optimizes starting torque. The starting capacitor is switched out of the circuit at running speed.
Sometimes the capacitor fails and the motor will not start. A simple test is to remove the capacitor and check with an ohmmeter (Ref. 2). If possible set to the highest ohms scale. Upon contact with the terminals, the ohm value should drop rapidly and then slow down and rise again. This means the capacitor should be operational. However, if the ohms go immediately to a low value near zero, the capacitor is shorted. If the value stays very high, the capacitor is open circuited. Installing a new capacitor of equal rating should remedy the problem.
Figure 4-10: Capacitor Start - Capacitor Run Motor
Both starting torque and running characteristics are optimized.
Shaded Pole Motors
A shaded pole motor is the simplest form of a single phase motor and is very low in cost (Figure 4-11).
It develops a rotating field by delaying the build up of magnetic flux through part of the pole structure.
Figure 4-11: Shaded Pole Motor
The shaded portion of the pole is isolated from the rest of the pole by a copper conductor that forms a single turn around it.
The magnetic flux in the unshaded portion increases with the current through its winding. Magnetic flux increases in the shaded portion; however, it is delayed by the current induced in the copper field.
The magnetic field sweeps across the pole face from the unshaded portion to the shaded portion, developing a torque in the squirrel cage.
To maximize torque, the rotor is made with relatively high resistance.
Shaded pole motors are used where low torque is acceptable (such as fans) and are usually less than 1/4 HP.
Due to their very low efficiency, shaded pole motors should only be used in applications where the motor is either very small or operates for very short periods of time (e.g. shower fan motor).
Synchronous Motors
A synchronous motor produces magnetic poles at fixed positions on the rotor.
These poles lock onto the rotating field of the stator and turn the rotor at synchronous speed based on the 60Hz supply frequency.
A simple way to determine the speed of a synchronous motor is to divide 3600 by half the number of poles. For example a 2 pole machine will turn at 3600 rpm, a 4 pole 1800 rpm, 6 pole 1200 rpm, etc.
There are several different types of single and 3-phase synchronous motors.
Synchronous motors are significantly more expensive than induction motors. Their use is typically limited to applications where uniform speed is absolutely required and motor slip cannot be tolerated (See Section 4 a).
Excited Rotor Synchronous Motor
The magnetic poles on the rotor are electromagnets supplied with direct current either by slip rings from a stationary external DC power supply or internally by an alternator mounted on the rotor shaft (brushless type) (Figure 4-12).
Figure 4-12: Exciter for Brushless Synchronous Motor
The amount of excitation can be adjusted by varying the rotor current on the brush-type motor or the alternator field excitation on the brushless type.
Altering the level of rotor excitation changes the power factor of the motor.
The motor can run with a lagging power factor (underexcited) or a leading power factor (overexcited).
An overexcited synchronous motor can be used to correct poor power factor in a plant and can be adjusted as needed. Such a setup is sometimes referred to as having a "synchronous condenser."
Non Excited or Reluctance Rotor Synchronous Motor
This design uses an iron rotor shaped to favour fixed paths for magnetic flux (Figure 4-13). They typically range from fractional horsepower to about 30 HP.
Figure 4-13: Non Excited Synchronous Motor Rotor
Permanent magnets are sometimes used on the rotors of smaller motors.
Reluctance rotor motors have low power factors during operation. They are also physically larger than the excited type motors of similar power rating.
Single Phase Synchronous Motors
Any single phase stator configuration can be used to make a reluctance type synchronous motor (Figure 4-14).
The rotor is essentially a squirrel cage with some of its bars removed in positions that favour specific magnetic flux paths.
During start-up the rotor lags the rotating magnetic field, similar to an induction motor.
When the motor approaches synchronous speed, reluctance torque causes the rotor to synchronize with the stator field.
This design is used in low power applications where synchronous speed is required.
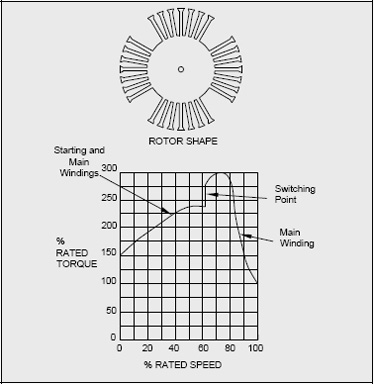
Figure 4-14: Single Phase Reluctance Motor
Hysterisis Motor
For a hysterisis motor, the rotor is typically a cylinder of magnetically hard steel without any windings or teeth (Figure 4-15).
Stator windings are usually a split capacitor type, with the capacitor chosen to approximate two phase operation as closely as possible.
Figure 4-15: Hysterisis Motor
The high retentivity of the rotor material causes its magnetic orientation to lag behind the rotating magnetic field by a fraction of a rotation.
Interaction between the rotating field and the rotor's magnetic polarity subjects the rotor to a torque which is consistent from standstill to synchronous speed.
This design allows synchronization of high inertia loads.
Operation is generally smooth and quiet because of the smooth rotor periphery.
Hysterisis motors are generally used in low power application such as clocks.
Universal Motors
Universal motors are series wound, with rotor circuitry similar to DC motors (Figure 4-16).
The term universal results from their ability to operate on either DC or AC power.
The operation and construction of these motors closely resemble DC motors, with components designed for efficiency on AC up to the line frequency (See Section 5 b).
Operating speeds typically range from 3,000 to 15,000 RPM. The speed will drop with increasing load.
A high horsepower to size ratio is characteristic of this design.
Maintenance requirements per hour of operation are higher than other designs due to the brush/commutator setup.
On motors with accessible brushes (typically coin-slot screw plugs on either side of the motor), brush condition should be checked occasionally to ensure adequate brush material remains. When the brush is getting close to the holder or braided end lead, it should be replaced with the same size and type of brush. If the brush runs out and the holder touches the commutator, there will be a lot of sparking when the motor is operated. Should this occur, stop the motor immediately. Permanent damage may have been caused, but new brushes may remedy the situation.
Common uses of these motors include low duty cycle applications such as power saws, drills, vacuum cleaners and lawn mowers. Sizes up to about 2 HP are common.
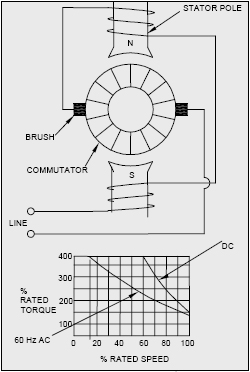
Figure 4-16: Universal Motor
DC Motors
DC motors possess characteristics that make them attractive for certain applications. For example, very high torque at low speeds makes the series DC motor attractive for traction and engine starting applications.
Rotational speed can easily be controlled by varying the supply voltage.
The following is a general description typical of the DC motors:
The rotating part (rotor) of a DC motor is called the armature, and consists of windings similar to those in a wound rotor induction motor (Figure 5-1).
The stationary part (stator) introduces a magnetic field by either permanent magnets or field windings which act on the armature.
Current flows through the armature windings via carbon brushes and a commutator assembly. The commutator assembly is easily recognizable as a ring of parallel diametrically opposite pairs of rectangular shaped copper contacts at one end of the armature. Each pair of contacts is connected to a coil wound on the armature. The carbon brushes maintain contact with the commutator assembly via springs. When the motor is turned on, current flows in through one brush via a commutator contact connected to a coil winding on the armature, and flows out the other carbon brush via a diametrically opposite commutator contact. This causes the armature to appear as a magnet with which the stator field interacts. The armature field will attempt to align itself with the stator field. When this occurs, torque is produced and the armature will move slightly. At this time, connection with the first pair of commutator contacts is broken and the next pair lines up with the carbon brushes. This process repeats and the motor continues to turn.
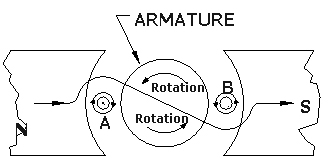
Figure 5-1: Torque Production in a DC Motor
Separately Excited DC Motor
The field (or stator) coil contains a relatively large number of turns which minimizes the current required to produce a strong stator field (Figure 5-2). It is connected to a separate DC power supply, thus making field current independent of load or armature current.
Excellent speed regulation is characteristic of this design which lends itself well to speed control by variation of the field current.
Separately excited DC motors can race to dangerously high speeds (theoretically infinity) if current to the field coil is lost. Because of this, applications should include some form of field current protection as an unprotected motor could literally fly apart.
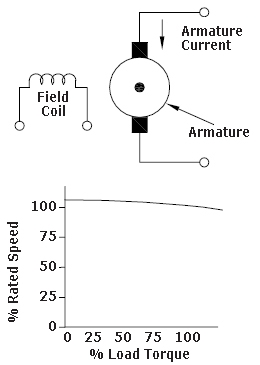
Figure 5-2: Separately Excited DC Motor
Series Field DC Motor
The field coil has a relatively small number of turns, and is connected in series with the armature (Figure 5-3). Because it carries full armature current, the magnetic field strength increases with load and armature current.
Very high starting torque is the characteristic of this design.
Speed regulation is poor with a very high no load speed.
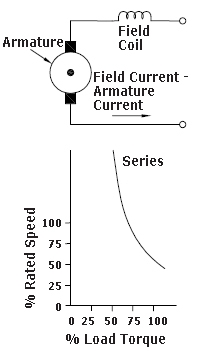
Figure 5-3: Series Field Motor
Compound DC Motor
The compound DC motor uses both series and shunt field windings, which are usually connected so that their fields add cumulatively (Figure 5-4).
This two winding connection produces characteristics intermediate to the shunt field and series field motors.
Speed regulation is better than that of the series field motor.
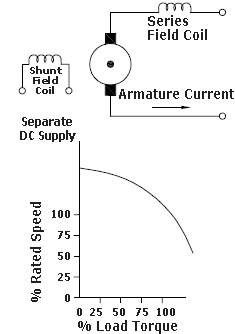
Figure 5-4: Compound DC Motor
Permanent Magnet DC Motors
These motors use permanent magnets in place of field windings to establish the stator magnetic field (Figure 5-5).
Permanent magnets provide constant field strength, with motor characteristics similar to that of the shunt field DC motor.
Permanent magnet motors are often used in low horsepower applications, particularly those that are battery operated (e.g. windshield wiper motor). However, with recent developments in magnet technology, permanent magnet motors can be greater than 200 HP.
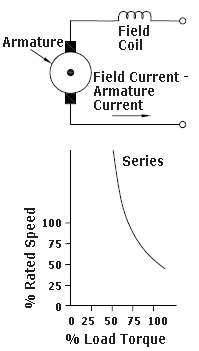
Figure 5-5: Permanent Magnet DC Motor
Advanced Motors
Electronically Commutated Motor (ECM)
An ECM is an electronically commutated permanent magnet DC motor (Figure 6-1).
Electronics provide precisely timed voltages to the coils, and use rotation position sensors for timing.
Figure 6-1: Electronically Commutated Motor (ECM)
The electronic controller can be programmed to vary the torque speed characteristics of the motor for a wide variety of OEM applications such as fans and drives.
Although presently more costly than alternative motor technologies, the higher efficiency and flexible operating characteristics of these motors make them attractive.
An ECM is essentially a brushless DC motor with all speed and torque controls built in (Ref. 3). Typical applications include variable torque drives for fans and pumps, commercial refrigeration, and appliances.
For furnace fans, efficiency can be 20 to 30 percentage points higher than a standard induction motor at full load. However, for constant air circulation ECM's have a definite advantage over standard direct drive blower motors. At half speed, the ECM might consume as little as 10% of the energy of a multi speed blower motor.
For appliances such as washing machines, the ECM can replace the mechanical transmission due to wide range of torque speed characteristics it can produce.
Switched Reluctance Motor (SRM)
The advantage of a switched reluctance motor is high torque at low speed, plus a very high speed range (Figure 6-2).
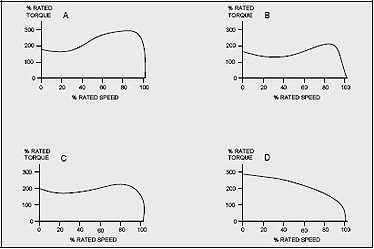
Figure 6-2: Switched Reluctance Motor (SRM)
As with the ECM, electronics provide precisely timed voltages to the coils and use rotation position sensors for timing.
Switched Reluctance motors are used for several hundred thousand premium washing machines per year. No transmission is needed (Ref. 20).
Permanent Magnet Motors
New high strength magnetic materials and power electronics have been combined to produce high efficiency variable speed motors ranging from sub fractional to multiple horse power units. Generally these motors/controls are purpose built and are therefore incorporated into OEM products.
Other Advanced Motors
Written Pole Motor
Written-Pole motors are special single-phase AC motors which can change the position of magnetic poles while the motor operates (Figure 6-3) (Ref. 4).
In written-pole motors, "permanent" magnet poles are continuously and instantaneously written on a magnetic layer in the rotor by an exciter pole in the stator. The magnetic poles are written to a different spot on the rotor during each revolution when rotor speed changes. This keeps the pole pattern at a constant poles/sec speed.
Most written-pole motors feature an external rotor that spins around an internal stator, opposite that of conventional motors. This inverted structure creates a flywheel effect that allows the machine to ride through brief power disturbances. A 3-phase generator built into the motor provides power to external loads for up to 15 seconds at full load.
The rotor's construction with permanent magnets reduces starting current. Written-pole motors need only one-third the amount of starting current as conventional induction motors.
The written pole motor has found a market in areas with a large number of external power line disturbances brought on by lightening, as they are more immune to such disturbances than power electronics.
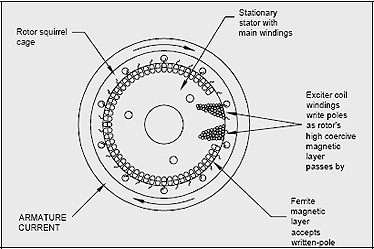
Figure 6-3: Written Pole Motor
Linear DC Motors
A linear DC motor, like a rotating DC motor, generates mechanical force by the interaction of current in conductors and magnetic flux provided by permanent rare-earth magnets (Ref. 5).
These motors are constructed of a stator assembly and a slider. The stator assembly contains a laminated steel structure with conductors wound in transverse slots. The slider houses magnets, commutation components and a bearing surface.
Some linear DC motors use a brushless slider that contains an additional set of magnets which activate hall-effect sensors and solid-state switches to commutate the motor windings. This type of motor is capable of precision accuracy to 0.1 micron and does not deteriorate with wear. It can drive loads directly with a wide range of thrust and travel.
Linear AC Motors
Linear AC motors (LIMs) are often used in rail propulsion systems. Stator coils are embedded along the track. Examples of linear AC Motors include the Vancouver Sky Train and the Tomorrowland Transit Authority at Walt Disney World. Speeds of up to 400 km/h are achievable.
Hybrid Motor
The hybrid motor combines the qualities of variable reluctance (VR) and permanent magnet (PM) motors, to achieve desirable features of each (Figure 6-4). They have high detent torque and excellent holding and dynamic torque, and they can operate at high stepping speeds. Normally, they exhibit step angles of 0.9 to 5 degrees. If the phases are energized one at a time in the order indicated, the rotor would rotate in increments of 1.8 degrees. This motor can be driven two phases at a time to yield more torque. It can also be driven to alternate between one and two phase to produce half steps or 0.9 degree increments.
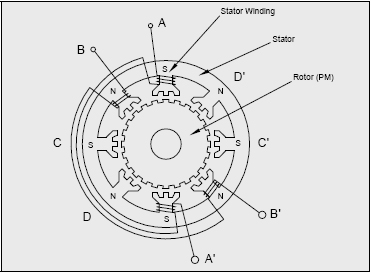
Figure 6-4: Hybrid Motor
Motor Selection
Electrical Supply Considerations
The electrical supply distribution system must supply the correct voltage and have sufficient capacity to start and operate the motor load. Table 7 1 provides a cross comparison of nominal system voltage to show what one might find on a typical motor nameplate.
The limit to the supply voltage is dependent on the current required to operate the motor. For example, a 50 HP motor will require 150 Amps to operate at 208/120 volts, but requires only 50 Amps at 600/347 volts. Therefore, it would not be economically practical to provide motors beyond a certain HP rating for a given voltage when the conductor size becomes too large both in the supply to and within the motor.
Single Phase:
Single phase motors are rated for 120/240 volts at 60 Hz.
3-Phase:
3-phase motors up to 100 HP are available for 200, 240/460, 460 or 600 volts at 60 Hz. For 125 HP and up, they are available for 460, 600, 2400 or 4160 volts at 60 Hz.
Voltage and Frequency
Motors can be specified to operate on voltages and frequencies other than standard. An example of this is low voltage 400 Hz motors that are used in the aircraft industry, as well as some mine tool applications.
The nominal supply voltage of the power system and the utilization or nameplate voltage on the motor often differ. The following table (Table 7-1) shows the relation between motor nameplate voltage and the correct supply voltage for that motor.
| Nominal System Voltage | Motor Nameplate Voltage |
|---|---|
| 120 – 1 phase | 115 |
| 208/120 – 3 phase | 200 |
| 240 – 1 phase or 3 phase | 230 |
| 480/277 – 3 phase | 460 |
| 600/347 – 3 phase | 575 |
| 2400 – 3 phase | 2300 |
| 4160/2400 – 3 phase | 4000 |
The following should be considered when selecting a motor for a particular application:
- The mechanical requirements of the driven load.
- Motor classification.
- The electrical distribution system.
- Physical and environmental considerations.
The ultimate selection will be a motor available from a manufacturer that meets or exceeds the required specifications.
3-phase induction motors are designed to operate successfully with voltage variations of ± 10%. Table 7 2 shows the effects of a 10% variation on a typical Design B induction motor at full load.
| Characteristic | Voltage | |
|---|---|---|
| 110% | 90% | |
| Slip | -17% | +23% |
| Efficiency | +1% | -2% |
| Power Factor | -3% | +1% |
| Current | -7% | +11% |
| Temperature oC | -4% | +7% |
| Starting Torque | +21% | -19% |
| Starting Current | +10% | -10% |
The use of a motor with a non-standard or incorrect utilization voltage from the supply system should be avoided. For example, a motor with a nameplate voltage of 440 V is sometimes connected to a 480 V system. While the maximum allowable voltage for the motor is 484 V (110% x 440) there is no allowance for an upward supply voltage variation (for example, the utility can supply 500 volts and be within accepted tolerances) as the motor is already operating at its upward supply voltage limit. A motor of the proper voltage rating should be used, or a transformer should be installed to supply the correct voltage.
Phase voltage unbalance must be less than 1% for proper motor operation. A phase unbalance of 3.5% results in a temperature rise of 25% and a current increase of 6-10 times the voltage unbalance. These effects occur due to negative sequence currents flowing in the motor. Voltage unbalance is calculated as follows:

As an example, if line voltages were measured as 600, 585, and 609 volts, the average is 589 volts. The maximum deviation from average is 13 volts (598-585), and thus the voltage unbalance is (13/598) x 100 = 2.2%.
If a motor must be operated with a phase unbalance of greater than 1%, then the motor should be derated according to the following graph:
Figure 7-1: 3-phase Squirrel Cage Induction Motors Derating Factor Due to Unbalanced Voltage
A motor should not be operated if the phase unbalance is greater than 5%.
Frequency variation of up to 5% is permitted for normal motor operation. However, this should never be a problem if the system is supplied from a utility. Motor speed varies directly with the frequency of the power supply.
Power Factor
Most AC motors require reactive power from the supply system to develop magnetic fields. Measured in kVARs, reactive power does not provide any mechanical work.
Useful mechanical work is developed from real power supplied by the supply system and is measured in kilowatts (kW).
The supply distribution system provides both real and reactive power to operate the motor. The vector sum of real and reactive power is called the apparent power and is expressed in kVA.
The reactive component stays essentially constant whether a motor is lightly or heavily loaded. Therefore lightly loaded motors are said to have a lower power factor than a fully loaded motor. A facility with a very low uncorrected power factor is indicative of a significantly high number of under loaded motors.
If you are billed for kVA, then you are paying for the reactive power component and you are not getting any useful work. The measure of real power (kW) divided by total power (kVA) is defined as the "power factor." The highest power factor achievable is 1 or "unity" power factor and is often expressed as a percentage with 1 equal to 100%.
Industrial customers install capacitors to cancel the inductive component of motor loads to improve their power factor. In Figure 7-2, the vertical vector above the real power line represents the inductive component and the horizontal vector represents the real power. The hypotenuse vector equals the square root of the sum of the squared real and reactive vectors (See the equation following Figure 7-2). The vertical vector pointing below the horizontal line represents the capacitive reactance. When the capacitive reactance equals the inductive reactance, the two vertical vectors cancel each other out, leaving only the real power component (i.e. unity power factor). However, if capacitance exceeds inductance, a leading power factor will result which could result in over voltage and harmonic problems. To avoid this, capacitors should be switched on and off to match at the service entrance or better still installed at the motor load.
Figure 7-2: Power Factor Triangle
Text version figure 7-2
Power Factor Triangle
the vertical vector above the real power line represents the inductive component and the horizontal vector represents the real power. The hypotenuse vector equals the square root of the sum of the squared real and reactive vectors. The vertical vector pointing below the horizontal line represents the capacitive reactance. When the capacitive reactance equals the inductive reactance, the two vertical vectors cancel each other out, leaving only the real power component (i.e. unity power factor).

Voltage Flicker
Starting motors or other large loads causes a voltage drop on the supply system due to the effect of their high inrush currents on the circuit impedance. This may be perceived as a flicker in lighting circuits. As the motor comes up to speed, the current falls to normal operating levels and system voltage rises. This flicker becomes objectionable when the magnitude of the voltage drop and the frequency of occurrence exceed certain thresholds. This threshold of objection is shown on a voltage flicker curve (Figure 7-3).
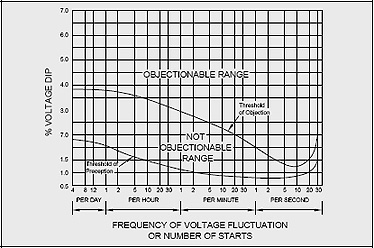
Figure 7-3: Voltage Flicker Curve
If the magnitude of voltage drop and the frequency of occurrence lie below the threshold of objection, but about the threshold of perception, people notice the light flicker, but generally do not find it irritating.
If the magnitude of the voltage drop and the frequency of occurrence lie below the threshold of perception, people do not generally notice any flicker.
Some electronic devices such as PCs, televisions and PLCs may not be able to tolerate voltage flicker as well as others. While some devices can ride through minor flicker incidents, others may lock up or suffer component failure.
As an example, consider a 5 HP motor supplied by a 208 V feeder which also supplies 120 V lighting circuits (Figure 7-4).
Assume: 5 HP motor
Full Load Amps = 16 A
Starting current = 96 A
Feeder impedance = 0.06 Ω
Calculate Feeder Voltage Drop:
Voltage drop along feeder = starting current (A) x feeder impedance Ω
=96A x 0.06Ω
= 6 V
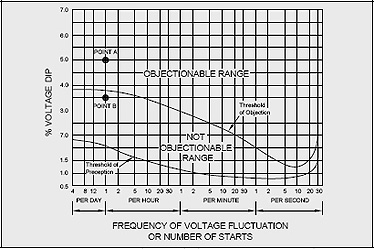
Figure 7-4: Voltage Flicker Curve - Example
The 6 V drop along the feeder is equal to 5% of the voltage on the 1320 V lighting circuit and causes a noticeable flicker.
If the motor is started once every hour then the point on the flicker curve is in the objectionable range (point A).
To correct this problem, the lighting circuits can be supplied from a separate feeder, or the voltage drop along the feeder can be reduced. In this case, a drop of 3.6% or less is not objectionable.
Supplying the lighting from a different feeder or upgrading the feeder is one approach that is often used.
A reduced voltage starter for the motor is another alternative and is often a very cost effective solution.
If the starting current is limited to 70% of its normal value by use of a reduced voltage starter, the voltage dip is 3.5% (70% x 5%) and the motor starting once per hour is not objectionable (Point B).
Motor Considerations
3-Phase Motor
Induction Motor Selection:
Wound rotor induction motors are often referred to as squirrel cage. They are considered the workhorse of the industry because of their relatively low cost, high availability, and minimal maintenance requirements.
3-phase squirrel cage induction motors in the 1 to 200 HP range are specified by their design type: A, B, C or D.
These standard designs are suited to particular classes of applications based on the load requirements typical of each class.
Wound rotor induction motors are useful in some applications because their rotor circuits can be altered to give the desired starting or running characteristics; however, they require brush servicing maintenance.
Table 7-3 can be used to help determine which design type should be selected.
Design B motors are by far the most common and satisfy virtually all applications, except where high starting torque or high peak loads are encountered.
Design A is rarely used in new applications as the starting current is higher than design B for virtually the same starting torque. Design A is included here for completeness only.
| Classification | Starting Torque (Percent Rated Load Torque) |
Breakdown Torque (Percent Rated Load Torque) |
Starting Current | Slip | Typical Applications |
|---|---|---|---|---|---|
| Design A and B Normal starting current | 100-200% | 200-250% | Normal | <5% | Fans, blowers, centrifugal pumps and compressor, etc., where starting torque requirements are relatively low. |
| Design C High starting torque and normal starting current. | 200 - 250% | 200-250% | Normal | <5% | Conveyors, crushers, string machines, agitators, reciprocating pumps and compressors, etc., where starting under load is required. |
| Design D High starting torque and slip. | 275% | 275% | Low | >5% | High peak loads with flywheels such as punch presses, shears, elevators, extractors, winches and hoists, oil-well pumping and wiredrawing machines. |
| Wound rotor | Any torque up to the breakdown value | 225-275% | Depends on starting torque. | Depends on Rotor resistance | Where high starting, or limited (2:1) speed are required and where high inertia loading must be accelerated. |
Synchronous Motor Selection
A synchronous motor is sometimes selected instead of an induction motor because of its operating characteristics. It is significantly more expensive and only used if it can be justified by the following considerations:
Speed:
Synchronous motors operate at synchronous speed with no speed drop over the load range. They should be selected if exact speed is required.
Power Factor Correction:
Synchronous motors can generate reactive power to correct poor supply system power factor while delivering mechanical power. When supplying reactive power they are said to be operating at a leading power factor.
Lower Operating Costs:
Synchronous motors are often more energy efficient than induction motors, especially in the larger horsepower ranges.
A general rule of thumb is that a synchronous motor should be selected where the horsepower requirement exceeds the speed (in RPM) of the motor.
Direct Current Motor Selection
DC motors are often selected where precise speed control is required, as DC speed control is simpler, less costly and spans a greater range than AC speed control systems.
Where very high starting torque and/or high over-torque capability is required, DC motors are often selected.
They are also appropriate where equipment is battery powered.
Single Phase Motor
Single phase motors are selected according to the type of load or application for which they are intended. Table 7 4 lists motor types, characteristics and typical uses for single phase motors.
| Type | Typical RPM | Starting Torque as Percent of Full-Load Torque |
Comparative Efficiency | Typical Applications |
|---|---|---|---|---|
| Shaded Pole | 1050, 1550, 3000 | Very Low 50-100% | Low | Small direct-drive fans and blowers. |
| Permanent Split Capacitor (PSC) | 825, 1075, 1625 | Low 75-150% | Moderate | Direct-drive fans and blowers |
| Split-Phase | 1140, 1725, 3450 | Low to Moderate 130-170% | Moderate | Belt-drive and direct-drive fans and blowers, small tools, centrifugal pumps, and appliances |
| Capacitor-Start | 1140, 1725, 3450 | Moderate to High 200-400% | Moderate to High |
Pumps, compressors, tools, conveyors, farm equipment, and industrial ventilators |
Driven Load Considerations
For a motor to drive a load properly, it must produce enough torque to accelerate from standstill to operating speed, and it must supply enough power for all possible demands without exceeding its design limits.
For example, a motor with inadequate starting torque for the connected load will either not turn or will act sluggishly during acceleration. The starting current may persist for too long and consequently trip overload protection. While running, an undersized motor may stall if the load suddenly increases (e.g. too many sheets fed into a paper shredder).
To specify the motor properly, certain characteristics of the load should be considered.
Motors must be sized to accommodate the running load's speed and torque requirements. Load types can be classified into different duty cycles describing operating time and load variations.
If replacing an existing motor is considered, monitoring the power input to the motor over a period of time will determine an optimum size. Inexpensive battery powered data loggers work well for load trending.
There are three general classifications of duty cycle that describe most motor loads: continuous, repetitive and intermittent duty.
Continuous Duty - Torque Constant
The majority of motor applications are continuous duty.
This cycle has essentially a constant motor load for an indefinitely long period of time.
Size motors for the horsepower requirement of the continuous load.
Repetitive Duty Cycle - Variable Torque
This motor application has various loads that are well defined and repeating. For example, a plastic injection molding machine.
For repetitive duty cycle loads, the motor rating is determined form the root-mean-square or RMS horsepower.
The RMS horsepower is calculated by the following equation:
Text version RMS horsepower calculation
The RMS horsepower is the square root of the sums of the horsepower squared, times the time interval; divided by the sums of the time intervals.
The RMS horsepower is the square root of the sums of the horsepower squared, time the time interval; divided by the sums of the time intervals.
For example, consider the following horsepower-time curve (Figure 7-5).
Figure 7-5: Repeating Duty Cycle Curve
For this load the time interval and load are:
| Time (sec) | 0-10 | 10-20 | 20-30 | 30-40 | 40-50 | 50-60 |
|---|---|---|---|---|---|---|
| Load (HP) | 5 | 7 | 1 | 9 | 1 | 8 |
| HP²t | 250 | 490 | 10 | 810 | 10 | 640 |
The RMS horsepower is calculated as:

Text version - RMS horsepower calculation
RMS horsepower is equal to the square root of 250 plus 490 plus 10 plus 810 plus 10 plus 640 divided by 10 plus 10 plus 10 plus 10 plus 10 plus 10. This resolves to an answer of 6.07.
The next higher standard rating, a 7.5 HP motor would be the appropriate choice since 6.07 HP motors aren't available.
Intermittent Duty
This cycle alternates between indefinite intervals of load and no-load; load and rest; or load, no-load and rest. For example, a garage door opener.
Select motor so the horsepower rating of the motor matches the loaded power requirement.
Speed
Starting and Stopping
Frequency of starting and stopping. For frequent starts, ensure winding and core temperature do not exceed motor rating.
Starting torque requirement. Pay special attention to high inertia loads to ensure motor starting torque is adequate.
Acceleration restrictions. Ensure the motor driving the load reaches full speed quickly enough to avoid tripping the overload protection. Conversely, some loads require time to accelerate to full speed, e.g. a conveyor belt - a variable speed drive may be justified to achieve this and keep current lower when starting up.
Custom
Manufacturers' lines of "standard" motors offer models that suit most applications. Standard motors are less expensive, have proven engineering and are available on shorter lead times. However, motors can be ordered with myriad of variations to fit special applications where a standard motor is not suitable. Each motor supplier can provide specific information on availability lead time and price.
Environmental Factors
Usual Service Conditions
Motor ratings apply to motors operating under usual service conditions.
NEMA Standard MG 1 specifies usual environmental conditions as:
- Exposure to an ambient temperature in the range of 0°C to 40°C; when water cooling is used, in the range of 10°C to 40°C.
- Exposure to an altitude which does not exceed 3300 feet (1000 metres), (See MG 1-14.04).
- Installation on a rigid mounting surface.
- Installation in areas or supplementary enclosures which do not seriously interfere with the ventilation of the machine.
Unusual Service Conditions
The manufacturer should be consulted if the motor is to be operated in unusual service conditions.
NEMA standards specify typical unusual service conditions as:
- Exposure to:
- Combustible, explosive, abrasive, or conducting dusts.
- Lint or very dirty operating conditions where the accumulation of dirt may interfere with normal ventilation.
- Chemical fumes, flammable or explosive gasses.
- Nuclear radiation.
- Steam, salt-laden air, or oil vapour.
- Damp or very dry locations, radiant heat, vermin infestation, or atmospheres conducive to the growth of fungus.
- Abnormal shock, vibration, or mechanical loading from external sources.
- Abnormal axial or side thrust imposed on the motor shaft.
- Operation where:
- There is excessive departure from rated voltage or frequency, or both (See MG 1012.44 for alternating current motors and MG 1-16.64 for direct-current motors).
- The deviation factor of the alternating-current supply voltage exceeds 10%.
- The alternating-current supply voltage is unbalanced by more than 1% (see MG 1-12.45 and MG 1-14.35).
- The rectifier output supplying a direct-current motor is unbalanced so that the difference between the highest and lowest peak amplitudes of the current pulses over one cycle exceed 10% of the highest pulse amplitude at rated armature current.
- Low noise levels are required.
- Operation at speeds above the highest rated speed.
- Operation in a poorly ventilated room, in a pit, or in an inclined position.
- Operation subject to:
- Torsion impact loads.
- Repetitive abnormal overloads.
- Reversing or electric braking.
- Operation of a machine at standstill with any winding continuously energized, or of a short-time-rated machine with any winding continuously energized.
- Operation of a direct-current machine where the average armature current is less than 50 percent of the rated full-load Amperes over a 4-hour period, or continuous operation at armature current less than 50 percent of rated current for more than 4 hours.
Physical Factors
Enclosure
The enclosure for the motor should be chosen to protect it from the expected operating environment.
Table 7 6 lists standard enclosures as specified by NEMA.
| Types | Characteristics |
| Open: | |
| Drip-proof (ODP) | Operate with dripping liquids up to 15' from vertical |
| Splash-proof | Operate with splashing liquids up to 100' from vertical |
| Guarded | Guarded by limited size openings (less than ¾ in.) |
| Semiguarded | Only top half of motor guarded. |
| Drip-proof fully guarded | Drip proof motor with limited size openings. |
| Externally ventilated | Ventilated with separate motor driven blower, can have other types of protection. |
| Pipe ventilated | Openings accept inlet ducts or pipe for air cooling. |
| Weather protected type 1 | Ventilating passages minimize entrance of rain, snow, and airborne particles. Passages are less than ¾ in. in diameter. |
| Weather protected type 2 | Motors have in addition to type 1, passages to discharge high-velocity particles blown into the motor. |
| Totally enclosed: | |
| Nonventilated (TENV) | Not equipped for external cooling. |
| Fan-cooled (TEFC) | Cooled by external integral fan. |
| Explosion-proof (TEXP) | Withstands internal gas explosion. Prevents ignition of external gas. |
| Dust-ignition-proof | Excludes ignitable amounts of dust and amounts of dust that would degrade performance. |
| Waterproof | Excludes leakage except around shaft. |
| Pipe-ventilated | Openings accept inlet ducts or pipe for air cooling. |
| Water-cooled | Cooled by circulating water. |
| Water to air-cooled | Cooled by water-cooled air. |
| Air-to-air cooled | Cooled by air-cooled air. |
| Guarded TEFC | Fan cooled and guarded by limited size openings. |
| Encapsulated | Has resin-filled windings for severe operating conditions. |
Mounting and Base Considerations
Motors are generally mounted horizontally with feet attached to the floor, but other arrangements are common:
- Wall mounted
- Ceiling mounted
- Pedestal mounted
- Face mounted
- Flange mounted
The size and length of the shaft can be specified if the standard shaft types or materials are not suitable for the required mounting arrangement or machine configuration.
Insulation
The type of insulation used in a motor depends on the operating temperature that the motor will experience. Motors are specified by ambient temperature and insulation class.
Class A is an older obsolete classification. Class B is the current standard.
Class F and H are used for higher temperature applications and are often available as "standard" by many motor manufacturers.
Average insulation life decreases rapidly with increasing temperature. A cool running motor will have a much longer insulation life.
| Class | AC Motor DC. Motor W/1.00 S.F. Max. Total Temperature Range (Including Ambient and Temperature 110oCHot Spot) Range |
DC Motor Total Temperature Range |
|---|---|---|
| A | 105°C | 110°C |
| B | 130°C | 140°C |
| F | 155°C | 170°C |
| H | 180°C | 195°C |
Table 7-7 shows the maximum allowable stator winding temperature for an operating life of 20,000 hr and a maximum ambient temperature of 40°C.
As a general rule of thumb, insulation life doubles for each 10°C of unused insulation temperature capability. For example, if you design a motor to have a total temperature of 110°C (including ambient, rise, and hot spot allowance), but build it with a Class B (130°C) system, an unused capacity of 20°C exists. This extra margin raises the expected motor insulation life from 20,000 hrs to 80,000 hrs.
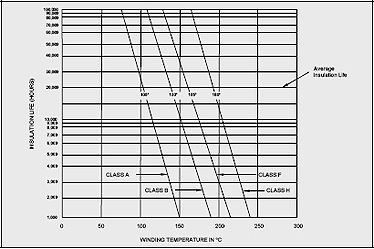
Figure 7-6: Insulation Life vs. Temperature
Service Factors
Motor service factor is an indication of the ability to exceed the mechanical power output rating on a sustained basis. A service factor of greater than 1.0 allows a margin for peak horsepower demand without selecting the next larger motor size. At an ambient temperature of 40°C, the standard service factor for integral HP motors up to 200 HP is 1.15.
Motor efficiency is usually reduced during operation at the service factor rating.
Service factors for higher temperatures or high altitude (>3300 feet) can often be specified where required.
Noise
If a motor is applied in an area where noise levels are of concern, motors equipped with plain bearings and specially designed ventilation systems are available. Plain bearings are quieter than roller or ball bearings.
If noise is a real issue, there are many active and passive technologies available to substantially reduce audible noise. Motors inherently have repetitive noise emissions and therefore lend themselves to noise cancelling techniques. Producing an equal and opposite phase waveform of the noise effectively cancels or substantially reduces motor noise. Noise cancelling headphones for air passengers use these techniques to effectively block out engine noise.
Efficiency and Economics
When selecting a motor for a particular application, both its capital cost and the cost of energy for operation should be considered.
Energy Costs
The cost of electricity to run a motor for one year can easily exceed the purchase price of the motor.
Figure 7-7 shows the operating cost for a typical standard efficiency 20 HP motor operating for one year at 88% efficiency.
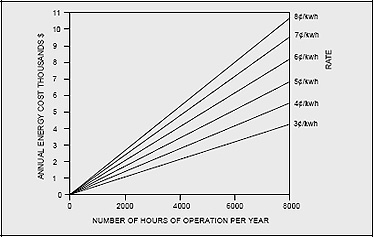
Figure 7-7: Annual Operating Costs of a 20 HP Motor
Since the operating cost over the life of a motor is often many times its purchase price, small differences in motor efficiency can yield significant savings.
Motor Efficiency
The efficiency of a motor is the ratio of mechanical power output to the electrical power input and is usually expressed as a percentage.

Electric motors are generally efficient devices, but with enhanced materials and improved design they can operate with fewer losses. These are referred to as energy efficient motors because they produce the same mechanical output power using less electrical input power than a standard motor.
Motors can experience losses, whereby they consume electrical energy, but do not contribute useful mechanical energy output.
They occur in five areas:
- Core losses
- Stator losses
- Rotor losses
- Friction and windage
- Stray load losses
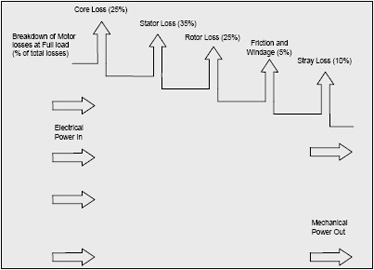
Figure 7-8: Motor Losses
Core losses are comprised of Hysterisis losses (the energy required to magnetize the core) and eddy current losses in the stator core (magnetically induced circulating currents). Core losses make up about 25% of the total losses.
Stator losses are due to the I2R heating effect of current flowing through the resistance of the stator windings. They account of approximately 35% of the total.
Rotor losses are caused by the I2R heating effect in the rotor. Rotor losses are responsible for about 25% of the total.
Friction and windage losses include bearing friction, wind friction on the rotor assembly, and the motor's cooling fan load. They make up about 5% of the total.
Efficiency and Motor Sizing
The efficiency of induction motors varies with load.
Peak efficiency occurs between about 60% and 100% of full load depending on design, and drops significantly below about 30% of full load (Figure 7-9).
Figure 7-9: Typical Motor Efficiency vs. Load
Good engineering practice dictates slightly over-sizing a motor for the following reasons:
- To allow for an increase in production
- To accommodate load fluctuations and overloads
- To accommodate the increase in load as the driven load wears
- To increase motor operating life because of lower winding temperatures.
Sizing a motor for operation at about 75% of full load provides what is generally considered to be a reasonable margin. A service factor of 1.15 allows an additional 15% margin over full load to accommodate short term peak load conditions.
Induction motors should not be grossly oversized (<50% load) as the initial cost and energy costs are greater and the power factor and efficiency are lower.
Life Cycle Cost
An electric motor can consume up to ten times its purchase cost annually over its lifetime which can range from 15 to 25 years or more. Improvements in efficiency can result in substantial savings in life cycle cost which includes the capital and operating costs.

Where:
C = initial capital cost plus installation
ET = total energy cost = Hr/yr x $/kWh x avg. kW x years
M = total maintenance cost = annual $ x years
More complex calculations include discount factors, inflation, energy price increases etc., all brought back to a present value. However, since energy is the most significant factor in lifecycle cost, simple comparisons can be quickly made using this formula.
For example, a 10 HP motor operates 50% of the time at an average output of 7.5 HP. Its efficiency is 88%. Purchase price is $700 and installation is $100. The motor is expected to last 10 years and cost $30/year to maintain. Electricity price is $0.05/kWh
Energy consumption would be as follows:



Performing the same calculation for an energy efficient motor (93%) that costs $150 more to buy would yield a lifecycle cost of $14,325, a saving of $699.
Motor Loss Reduction
Stator and rotor I²R heating losses are minimized by reducing the resistance of their respective windings. This is achieved by increasing cross sectional area, using higher conductivity materials or both.
Core losses are reduced by employing a high grade steel in the core laminations. This is generally achieved by increasing silicon content of the steel.
Thinner core laminations result in lower eddy core losses.
Increasing the cross sectional area of the stator and rotor lead to lower magnetic flux levels and thus lower Hysterisis losses.
Frictional losses are reduced with the use of smaller or better bearings.
Windage losses are minimized by using smaller fans. Even so, energy efficient motors usually run cooler than standard motors.
Energy Efficient vs. Standard Motors
Typical energy efficient motors are generally 1.5% to 8% more efficient than their standard motor counterparts with efficiency gains as high as 12% in the 1 HP range (Figure 7-10).
Figure 7-10: Typical Efficiencies of Standard and Energy Efficient Motors
There is quite a variation among different manufacturers as to how the qualitative terms "High Efficiency," "Premium Efficiency," or "Energy Efficient" 3-phase induction motors are applied. CSA Standard C390 (1993) states that an energy-efficient 3-phase induction motor is a motor rated from 1 to 200 HP, for which the nominal efficiency rating, at 75% or 100% of the rated load, is equal to or greater than the efficiency values shown in Table 7 8. CSA C390 (1993) is the recognized standard in Canada.
Other efficiency rating standards are described in the following paragraphs, including NEMA's voluntary premium efficiency program.
| Horsepower | 5 | 7.5 | 10 | 15 | 20 | 25 | 30 | 40 | 50 | 75 | 100 | 125 | 150 | 200 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ODP 1200 RPM | 87.5 | 88.5 | 90.2 | 90.2 | 91.7 | 92.4 | 93.0 | 93.0 | 93.0 | 93.6 | 94.1 | 94.1 | 94.5 | 94.5 |
| TEFC 1800 RPM | 87.5 | 89.5 | 89.5 | 91.0 | 91.0 | 92.4 | 92.4 | 93.0 | 93.0 | 94.1 | 94.5 | 94.5 | 95.0 | 95.0 |
Efficiency Ratings
Standardized tests are used to establish motor efficiency and performance.
Manufacturers use a dynamometer which loads the motor and measures the input and output power to test for efficiency.
There are three distinct standards commonly used to measure motor efficiency:
- CSA C390 (IEEE 112 method B)
- IEC 34-2 (British BS-269)
- JEC-37
There are some differences among these three methodologies, but the main difference is in the determination of stray load losses (Ref. 19).
IEEE 122 Method B determines the stray load losses through an indirect process. The IEC standard assumes stray load losses to be fixed at 0.5% of input while JEC standard assumes there are no stray load losses. Therefore, motor efficiencies determined by different standards are not comparable. Differences can be 5 percentage points or more.
Generally, CSA C390 (IEEE 112 Method B) is considered to be the most accurate method. Future harmonization among standards is likely, but will take time to implement.
NEMA has implemented a voluntary program which permits manufacturers to label their motors as "Premium Efficiency" if they meet or exceed minimum levels set by NEMA (NEMA Premium™, MG-1 2003 voluntary standard applicable to motors of 1 to 500 HP). Table 7 9 illustrates the advantage of premium efficiency over an energy efficient motor in terms of energy savings for a selection of motors.
| Full Load Efficiency % | Annual Savings from Use of a NEMA Premium Motor | ||||
|---|---|---|---|---|---|
| Horsepower | Energy Efficient Motor | Premium Efficiency Motor | Relative Energy Saving | Annual Energy Savings kWh | Dollar Saving $/year |
| 10 | 89.5 | 91.7 | 2.2 | 1200 | 60 |
| 25 | 92.4 | 93.6 | 1.2 | 1553 | 78 |
| 50 | 93.0 | 94.5 | 1.5 | 3820 | 191 |
| 100 | 94.5 | 95.4 | 0.9 | 4470 | 223 |
| 200 | 95.0 | 96.2 | 1.2 | 11,755 | 588 |
* Based on purchase of an 1800 RPM TEFC Motor with 8000 hr/year operation at 75% load at $0.05/kWh – source Motor Systems Tip Sheet #1 • September 2005 – US DOE Publication (Ref. 22).
In Canada, induction motors between 1 and 200 HP sold after 1998 must meet the minimum efficiency standards set in the CSA Standard CAN/CSA-C390-98. Such motors are called EPAct motors.
In recognition that motors are often part of an OEM piece of equipment, minimum efficiency requirements are being set (e.g. EER for air conditioners). This assures that the manufacturer will optimize overall efficiency in their design.
When comparing motor efficiencies, the comparison should be based on the "Nominal Efficiency" of the motor using one of the above test methods.
Free software is available on-line to help in selecting energy efficient motors.
In Canada, "CanMOST" (Ref. 8) is a good program to use. CanMost was derived from "IMSSA" (International Motor Selection and Savings Analysis) software, an international version of the successful MotorMaster+, developed by the U.S. motor energy-management software Washington State University Extension Energy Program (See Recommended Weblinks). The software is easy to use, comprehensive and up to date with present motors.
CanMOST's database is comprised of:
- Data on 25,000 North American motors
- The European Database of Efficient Electric Motor Systems (EuroDEEM), with 18,000 European motors
- Data on some 575 volt motors that are available only in Canada
Selecting Energy Efficient Motors
Because energy efficient and premium efficiency motors use more and better materials, they are also more expensive.
Premium efficiency motors should be selected when the cost premium over an energy efficient motor is recovered through reduced operating costs over a reasonable period of time.
Applications with high annual running hours and average to high loading are good candidates for energy efficient motors.
The operating cost of an electric motor can be calculated by knowing the horsepower rating of the motor, the motor loading, annual hours of operation and the blended electricity rate. The "blended" rate is an average electrical rate which takes into account both the demand and energy charge. The simplest method of obtaining a blended rate is to divide the total electric bill by the kWh consumed during the billing period. The resultant $/kWh provides a ballpark number for comparative purposes.
Utility billings can vary significantly and the number of line items can include kW demand, power factor, time of use, debt retirement charges, etc. An infrequently used motor operated coincidentally with the customer's peak could have a significant impact on the operating cost in terms of $/hour of operation due to the resultant peak demand charges which would overshadow the $/kWh charge.

If the actual motor loading is not known, an estimate of 65% can be used.
The bottom line is that you should contact your local utility to help you determine the actual cost of operating your motor.
Motors with different efficiencies can be compared on an economic basis by calculating the annual operating costs and comparing these savings to the price differential between the motors.
The most common economic analysis used for electric motors is a simple payback analysis.

For example, if a premium efficiency motor cost $400 more than a standard motor and is expected to save $300 per year in electricity, the simple payback would be 400/300 = 1.33 years.
Companies generally accept a payback in the range of 1 to 2 years or less. Longer paybacks may still be acceptable for other users including homeowners.
Another way to estimate savings is as follows:

Where:
- A=Motor Nameplate Horsepower
- B=Total Dollar Cost Per Kilowatt
- C=Hours Run Per Year
- D="Standard" Motor Efficiency-%
- E="Premium" Motor Efficiency-%
- F=Load Factor (avg. load HP/nameplate HP)
Therefore, if a 40 HP, 94.5% premium efficiency motor operating at 75% of rating, 6000 hours per year, the annual savings compared to a standard 89% efficient motor will be:

Annual savings will increase in proportion with electricity price, running hours per year, and load factor.
Assessing Existing Motor Inventory
Taking an inventory of existing motors can form the basis for an efficiency improvement plan. Sizes, type, duty cycle, and loading are all important factors to record. The motor's history including previous rewinds (if known) should be recorded. Monitoring motors with high running hours helps establish optimum sizing.
The largest motors with high duty cycles should be scrutinized for energy efficient replacements. Substantially oversized motors would also be likely candidates if the run time justifies the change. Previously repaired motors with high run times should be tested for efficiency using a dynamometer or equivalent means. Such testing would be limited to very large motors for economic reasons. Armed with this information, sound business cases can be developed to compete for capital improvement funding.
Having a motor inventory helps in deciding whether to buy new or to repair a failed motor. Older small motors are typically not worth repairing given the higher efficiency products available today.
Power Factor Issues
Motor power factor also drops significantly below 75% load (Figure 7-11). A lightly loaded motor will typically have a poorer power factor, resulting in a higher kVAR input than a motor more closely matched to the load.
Figure 7-11: Typical Power Factor vs. Load²
Therefore, if you are being billed in kVA, your cost of running the motor will be more than the work (kW) it is doing at 50%. See section 6A ii above for a more detailed explanation.
Motor Controls
There are four major motor control topics:
- Protection
- Starting
- Stopping
- Speed Control
Motor Protection
Motor protection safeguards the motor, the supply system and personnel from various upset conditions of the driven load, the supply system or the motor itself.
Disconnect
A suitable disconnect device of sufficient capacity is required usually within sight of the motor, in accordance with Canadian Electric Code requirements. The purpose is to open the supply conductors to the motor, allowing personnel to work safely on the installation.
Overcurrent
Overcurrent protection interrupts the electrical supply in the event that there is excessive current demand on the supply system. Usually in the form of fuses or circuit breakers, these devices operate when a short circuit or a very heavy overload occurs.
Should the overcurrent protection for a motor trip, there is usually a good reason. Investigate repeated tripping thoroughly and avoid increasing the trip setting level until it can be confirmed the motor can safely tolerate a higher setting. Operating currents should be measured on all 3 phases to ensure the phases are balanced and the motor is not running constantly in an overloaded condition.
Overload
Overload protection safeguards the motor from mechanical overload conditions.
Four common overload protection devices are:
- Overload relays
- Thermal overloads
- Electronic overload relays
- Fuses
Overload relays operate on the magnetic action of the load current flowing through a coil. When the load current becomes too high, a plunger is pulled up into the coil, interrupting the circuit. The tripping current is adjusted by altering the initial position of the plunger with respect to the coil.
A thermal overload relay uses a heater connected in series with the motor supply. The amount of heat produced increases with supply current. If an overload occurs, the heat produced causes a set of contacts to open, interrupting the circuit. The tripping current is changed by installing a different heater for the required trip point. This type of protection is very effective because the heater closely approximates the actual heating within the windings of the motor, and has a "memory" to prevent immediate reset and restarting.
With electronic overloads, the load current is sensed and the heating effect on the motor is computed. If an overload condition exists, the sensing circuit interrupts the power circuit. The tripping current can be adjusted to suit the particular application. Electronic overloads often perform additional protective functions, such as ground fault and phase loss protection.
Fuses can also be used to protect a motor, provided some form of single phasing protection is also used to prevent motor operation if only one fuse blows.
Other Protection
Low voltage protection operates when the supply voltage drops below a set value. The motor must be restarted upon resumption of normal supply voltage.
Low voltage release interrupts the circuit when the supply voltage drops below a set value, and re-establishes the circuit when the supply voltage returns to normal. Phase failure protection interrupts the power in all phases of a 3-phase circuit upon failure of any one phase. Normal fusing and overload protection may not adequately protect a 3-phase motor from damaging single phase operation. This is particularly a critical issue for motors supplied by a delta configuration voltage. Without this protection, the motor will continue to operate if one phase is lost. Large negative sequence currents are developed in the rotor circuit, causing excessive current and heating in the stator windings which will eventually burn out. Phase failure protection is the only effective way to protect a motor properly from single phasing.
Phase reversal protection operates upon detection of a phase reversal in a 3-phase circuit. This type of protection is used in applications such as elevators where it would be damaging or dangerous to have the motor run in reverse.
Ground fault protection operates when one phase of a motor shorts to ground, thus preventing high currents from damaging the stator windings and the iron core.
Other motor protection devices include bearing and winding temperature monitors, current differential relays, and vibration monitoring.
Generally, the level of protection used will rise in proportion with the value of the motor. Therefore, motors less than 20 HP will not normally have anything more than overload and overcurrent protection, unless the motor is driving a critical process.
Motor Starting
Induction motor starters must supply the motor with sufficient current to provide adequate starting torque under worst case line voltage and load conditions.
3-Phase Motor Starters
Across the Line Starting of Induction Motors:
An across the line starter is the least expensive option and is usually used for induction motors (Figure 8-1). All NEMA design induction motors up to 200 HP, and many larger ones, can withstand full induction starts.
Manual starters are often used for smaller motors – up to about 10 HP. They consist of a switch with one set of contacts for each phase and a thermal overload device. The starter contacts remain closed if the power is removed from the circuit and the motor restarts when power is reapplied.
If there is a chance of injury from a motor restarting unexpectedly, a magnetic starter should be used instead.
Figure 8-1: Manual Starter
Magnetic starters are used with larger motors or where remote control is desired (Figure 8-2). The main element of the starter is the contactor, which is a set of contacts operated by an electromagnetic coil. Energizing the coil causes the contacts A to close, allowing large currents to be initiated and interrupted by a control signal. The control voltage doesn’t need to be the same as the motor supply voltage, and is often low voltage, allowing the start and stop controls to be located away from the power circuit.
A fuse protected step-down transformer is often used for higher voltage motors. In addition to start and stop functions, the low voltage supply can also power remote status lights, etc.
Figure 8-2: Magnetic Starter
Closing the starter button contacts energizes the contactor coil. An auxiliary contact B on the contactor is wired to seal in the coil circuit. The contactor de-energizes if the control circuit is interrupted by operating the stop button, having the thermal overload relay operate, or if power is lost.
The overload contacts are arranged so an overload trip on any phase will cause all phases to open.
Contactors are rated for various operating voltages and are sized according to motor HP and type of duty expected.
Installing an extra Emergency RED STOP button next to a motor (or remotely) makes good sense when choosing a magnetic starter. The normally closed stop buttons are wired in series in the stop circuit such that depressing any one of them de-energizes the magnetic contactor.
Reduced Voltage Starters:
If the driven load or the power distribution system cannot accept a full voltage start, some type of reduced voltage or "soft" starting scheme must be used. Reduced voltage starters do not save energy. They are simply intended to address starting issues such as voltage sag and mechanical protection, and can only be used where low starting torque is acceptable. (See also Power Factor Controller).
Primary Resistance Starters:
Closing the contacts at A connects the motor to the supply via resistors which provide a voltage drop, thus reducing the starting voltage available to the motor (Figure 8-3). The resistors’ value is chosen to provide adequate starting torque while minimizing starting current. Motor inrush current declines during acceleration, reducing the voltage drop across the resistors and providing more motor torque. This results in smooth acceleration.
Figure 8-3: Primary Resistance Starter
Autotransformer Starters:
An autotransformer is a single winding transformer on a laminated core, with taps at various points on the winding (Figure 8-4). The taps are usually expressed as a percentage of the total number of turns and thus percentage of applied voltage output.
Three autotransformers are connected in a wye configuration or two in an open delta configuration, with taps selected to provide adequate starting current.
The motor is first energized at a reduced voltage by closing contacts A.
Figure 8-4: Autotransformer Starter
After a short time, the autotransformers are switched out of the circuit by opening contacts A and closing contacts B, thus applying full voltage to the motor. The autotransformers need not have high capacity as they are only used for a very short period of time.
Solid State Starters:
Solid state starters use thyristors or other solid state devices (e.g. silicon controlled rectifier, triacs, transistors, etc.) to control the voltage applied to the motor. A thyristor is essentially an electronic switch that can replace a mechanical contactor. However, unlike a mechanical contactor, a thyristor can be turned on and off at a point on the AC waveform during each cycle. For a 60-cycle AC, this can be 120 times per second per phase (i.e. on-off cycle per half cycle). Reducing the ON time during each cycle has the effect of reducing the average voltage output to the motor. By gradually increasing the ON time, the voltage increases gradually to full voltage. By reducing the voltage on start, current is also reduced. Start-up time tends to be longer as a result compared to a line voltage start. The starting function does not save energy, but rather addresses starting issues including voltage sag and mechanical protection.
Since the thyristors can be precisely controlled, it is possible (depending on the features of the individual starter) to limit starting current and also provide soft stopping (very useful for loads such as parts conveyors to prevent relative shifting on the belt).
Starting current and torque are easily adjusted and solid state starters often include other functions such as overload protection. See also Power Factor Controller.
Figure 8-5: Solid State Starter (Simplified)
Light dimmers use thyristors to dim lights. Turning the knob or moving the slider changes the portion of time the thyristor is turned on during each ½ cycle. Full brightness is achieved when the thyristor is turned on at the start of each ½ cycle.
Wye-Delta Starting:
Wye-delta starting (Figure 8-6) can be used with motors where all six leads of the stator windings are available (on some motors only three leads are accessible).
Figure 8-6: Wye-Delta Starter
By first closing contacts A and B, the windings are connected in a wye configuration which presents only 57% of rated voltage to the motor.
Full voltage is then applied by reconnecting the motor in a delta configuration by closing contacts C and opening those at A.
The starting current and torque are 33% of their full voltage ratings, limiting applications to loads requiring very low starting torque.
This type of starter is physically large and costly as many contactors are required to perform this task. Loads such as large chillers may employ a wye-delta starter. Solid state starters are becoming less costly and are competing with this special motor/starter arrangement.
Variable Frequency Drive Starting:
Variable Frequency Drives (VFDs) are also an effective means of starting a motor. By accelerating the motor up to speed by ramping the frequency of the voltage applied to the motor, inrush current can be minimized while maintaining sufficient torque to drive the load. This application of VFDs does not save energy; however variable torque applications do.
Power Factor Controller:
A power factor controller (PFC) is a solid state device which reduces voltage to the motor when the motor is lightly loaded. The magnetizing current and resistive losses are reduced in proportion to this reduction in voltage. When the load increases, the voltage rises to normal. The reduction in voltage results in improved power factor during these low load periods.
PFCs have been produced for single and 3-phase induction motors. To save energy, the average motor load needs to be minimal for extended periods of operating time. Constant load devices such as compressors are not good candidates for PFCs if the motor has been optimally sized for the load. A table saw motor would be a potential application if the motor is operated for extended periods and the material throughput is not constant. PFCs can also provide soft starting and stopping functions.
Originally developed by NASA in 1984, variations of PFC’s have been marketed for several years. Many have been promoted to the consumer market as energy saving receptacles. While the basic concept is sound, the plugs will do little to save energy in modern appliances that have been mandated to be energy efficient. Older appliances such as refrigerators may provide modest energy savings using these devices.
Part Winding Starters:
Part winding starters are sometimes used on motors wound for dual voltage operation such as a 230/460 V motor. These motors have two sets of windings which are connected in parallel for low voltage, and in series for high voltage operation.
When used on the lower voltage, the motors can be started by first energizing only one winding. This limits the starting current and torque to approximately one half of the full voltage values. The second winding is then connected normally once the motor nears operating speed.
Single Phase Motor Starters
Single phase motors are typically under 10 HP. Starters range from a simple dry contact switch for small single phase motors to magnetic contactors for larger sizes.
Solid state starters can be used for soft start motors to limit inrush current as well as provide variable speed capability. This type of starter is particularly suited to farm applications as it permits the use of larger motors on constrained single phase lines.
As noted previously, magnetic starters are always recommended if safety is a concern. A simple switch may cost only a few dollars, whereas a magnetic starter may cost $100 or more; however, avoiding a serious injury can make the magnetic starter priceless.
DC Motor Starters
Because the DC resistance of most motor armatures is low (0.05 to 0.5 ohms), and because the counter EMF does not exist until the armature begins to turn, it is necessary to use an external starting resistance in series with the armature of a DC motor to keep the initial armature current to a safe value. As the armature begins to turn, counter EMF increases. Because the counter EMF opposes the applied voltage, the armature current is reduced.
As the motor comes up to normal speed and full voltage is applied across the armature, the external resistance in series with the armature is decreased or eliminated. Controlling the starting resistance in a DC motor is accomplished either manually, by an operator, or by any of several automatic devices. The automatic devices are usually just switches controlled by motor speed sensors (Figure 8-7).
Another means of starting DC motors is via electronic reduced voltage starters which reduce inrush currents. This type of control is especially popular where variable speed control is required.
The DC motor is reversed by reversing the direction of the current in the armature. As the armature current is reversed, the current through the interpole is also reversed. Therefore, the interpole retains the proper polarity to provide automatic commutation.
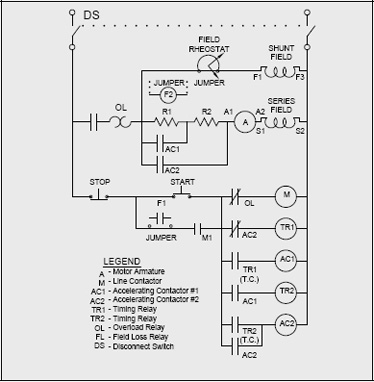
Figure 8-7: Example of a DC Motor Starter
Motor Stopping
The most common method of stopping a motor is to remove the supply voltage and allow the motor and load to come to a stop. In some applications however, the motor must be stopped more quickly or held in position by some sort of braking device.
Electrical Braking
Electrical braking uses the windings of the motor to produce a retarding torque. The kinetic energy of the rotor and the load is dissipated as heat in the rotor bars of the motor. Two means of electrical braking are plugging and dynamic breaking.
Plugging brings an induction motor to a very quick stop by connecting the motor for reverse rotation while it is running. To prevent the motor from reversing after it has come to a stop, the power is removed by means of a zero speed switch.
Dynamic braking is achieved by removing the AC power supply from the motor and applying direct current to one of the stator phases.
Neither plugging nor dynamic braking can hold the motor stationary after it has stopped.
Hand held circular and portable miter saws often employ electric braking. When the switch is released, the motor stops the spinning blade faster than if it were allowed to coast. If this feature stops working on a universal motor, check the brushes for wear and replace if necessary.
Regenerative Braking
Regenerative braking is a means of slowing a motor to a standstill by temporarily converting it to a generator when a stop command is issued. The motor (now generator) output is dissipated through power resistors or applied to charge a battery.
Regenerative braking is used in hybrid electric vehicles. Some of the energy is dissipated by conventional brakes while a portion is returned to the vehicle battery. For vehicles, this arrangement is needed to give the driver better control over braking. Charge acceptance of the battery depends on its state of charge.
Mechanical Braking
Mechanical braking refers to devices external to the motor which provide retarding torque.
Most rely on friction in a drum or disc brake arrangement and are set with a spring and released by a solenoid or motor.
These devices have the ability to hold a motor stationary.
An eddy current brake is an electromechanical device that provides a retarding torque by inducing eddy currents in a drum via an electromagnetic rotor attached to the motor shaft. The amount of braking force can be controlled by altering the rotor current.
Eddy current brakes cannot hold the motor stationary.
Motor Speed Control
The following are examples of typical motor speed controls. (This topic is more thoroughly covered in the Adjustable Speed Drive Guidebook).
Speed control can be classified into five general areas:
- Multi-speed motors.
- Wound rotor induction motor control
- DC motor controllers
- Variable speed drives for induction and synchronous motors.
- Mechanical speed control
Multi-speed Motors
Induction motors with multiple speed windings are suitable for applications requiring up to four discrete speeds. Speed is selected by connecting the windings in different configurations and is essentially constant at each setting. These motors are often found in applications such as ventilating fans and pumps.
Typically multi-speed motors are not particularly efficient at reduced speed. This type of motor is therefore is a poor choice for driving fans at low speed for constant air flow applications. An ECM would be a better choice for variable speed fans.
Wound Rotor Motor Control
The torque-speed characteristics of a wound rotor induction motor can be altered over a wide range by adding external resistance to the rotor circuit via the slip rings. Power extracted from the rotor circuit is either wasted as heat or recovered and converted into useful electrical or mechanical energy.
Higher maintenance is required for wound rotor motors. Periodic cleaning and brush replacement is needed.
DC Motor Control
The DC motor is the simplest to control as speed is proportional to armature voltage. Speed can be varied over a very wide range.
The DC voltage can be converted from AC by phase controlled rectifiers or generated by a motor-generator set (Ward Leonard system).
Exercise treadmills typically used 90VDC motors whose speed is varied by a variable voltage dc controller.
Variable Frequency Drives (VFDs) for Induction and Synchronous Motors
Variable frequency drives (VFDs) are applied when there is a need to control speed (induction and synchronous) and eliminate slip (induction). The speed of induction motors can be adjusted by electrical and mechanical means. Variable frequency drives control motor speed electrically.
Using a VFD can improve overall energy efficiency in spite of the fact that the drive itself consumes energy. Applications where the load requirement varies over a wide range with significant part load operation make VFDs an attractive option. Overall energy savings are realized using VFDs compared to the alternative methods of varying output (e.g. fan dampers and pump recirculation).
VFD’s operate by varying the frequency of the AC voltage supplied to the motor using solid state devices. The voltage is also controlled to provide a constant voltage to frequency ratio. These have become the preferred way to achieve variable speed operation as they are relatively inexpensive and very reliable.
The ability of a motor to cool itself effectively is reduced as the motor is slowed down.
Oversizing the motor or providing integrated forced air ventilation may be required with extended operation at low speeds and high loads.
Operation at different speeds can cause mechanical resonances in driven equipment. These speeds should be identified and programmed out of the VFDs operating range.
VFDs generate harmonic voltages and currents which can, in some cases, cause undesirable effects on the electrical distribution system and affect equipment operation. Sometimes isolating transformers, line reactors or filtering devices will be required to minimize these effects. Some new generation VFDs eliminate harmonics internally and eliminate external mitigation requirements.
The following graph of the allowable torque of NEMA design A&B motors due to reduced cooling by operation at reduced speeds can be used as a guide for derating motors or selecting an appropriately oversized motor (Figure 8-8).
VFDs have become cheaper and more reliable in recent years. That said, one should first assess if a VFD is needed or if a simpler solution is available. One should assess how much of the time the motor will be partly loaded to determine if significant savings are achievable or not. Unless the VFD is bypassed when the motor is operated at or near full load, the VFD will consume 2% to 5% of the total load rating and could cost more to operate than a fixed speed motor.
Figure 8-8: The Effect of Reduced Cooling on Torque Capability
Application of a VFD can cause voltage transients well above the rated voltage of the motor and can lead to failure of the insulation system. This is due to interactions of the PWM switching frequency and wave shape, the cable length supplying the motor, and the inductance of the motor.
Increased stress on motor insulation can occur because of voltage spikes. The high-frequency interruption from a VFD can produce very high voltage spikes which can rapidly break down conventional motor insulation.
This problem can be minimized by using appropriate filtering (line reactors), keeping cable runs short (<100 feet), using inverter duty motors with improved insulating systems, and ensuring that repaired motors have upgraded insulation systems.
Mechanical Speed Control
The speed at which the load is driven can also be adjusted by using devices external to the motor. Examples include continuously variable transmission, fluid coupling, eddy current clutches and the magnetic coupling drive. These devices convert the rated speed of the motor to the required load speed.
The magnetic coupling drive can use electromagnets or more recent developments employing rare earth magnets [e.g. neodymium/iron/boron (Ne/Fe/B)] to transmit torque between motor and load. A magnetic coupling can allow a motor to start up unloaded and gradually apply torque.
Mechanical speed control devices have internal losses, but these losses are usually fewer than when other means of control such as pump throttling or fan baffling are used. Energy savings for part load centrifugal loads can be 30% or more compared with mechanical throttling methods (Ref. 15). The latter statement also applies to VFDs.
Maintenance
In general, motors are very reliable machines that require little maintenance. However, it is important that preventive maintenance is performed to extend motor life and reduce the possibility of unplanned outages and lost production.
Common Failure Modes
Insulating failure and bearing failure are the two most common types of motor failures and are often preventable with simple maintenance.
Maintenance Frequency
The frequency or time interval between maintenance overhauls depends on a number of factors including:
- Running hours
- Frequency of starts, plugging, or reversals
- Load
- Operating environment, temperature, or dirt
- Importance to production
Motors operating continuously under normal service conditions should, on average, be overhauled every five or six years. Motors operating under more severe conditions should be overhauled more frequently. For motors operating fewer hours, the time interval can be extended accordingly.
Routine maintenance inspection and lubrication should be performed according to the manufacturer’s recommendations.
Where no recommendations exist, Table 9-1 could be used as a suggested guide for lubrication and inspection intervals.
| Speed | HP Size | 8 Hours/Day Operation | 24 Hours/Day Operation |
|---|---|---|---|
| 3600 RPM | 1 - 25 30 – 40 >40 |
5 Years 6 Months 4 Months |
2 Years 2 Months 2 Months |
| 1800 RPM | 1 – 20 25 – 50 60 – 70 >75 |
5 Years 4 Years 1 Year 9 Months |
2 Years 1 ½ Years 4 Months 3 Months |
| 1200 RPM and Below | 1 – 10 15 -30 >40 |
5 Years 4 Years 1 Year |
2 Years 1 ½ Years 4 Months |
4, 5 Source: Electrical Apparatus Service Association.
Smaller motors in the table are usually fitted with sealed bearings. These bearings should be replaced at the indicated intervals.
Bearings
Two types of bearings are commonly used in motors: Antifriction and Plain.
Antifriction Bearings
Antifriction bearings use rolling elements between the bearing and the rotating shaft (Figure 9-1). Ball bearings and roller bearings are examples of this type.
These bearings generally use grease as a lubricant. Some ball and roller bearings used in motors are sealed and need no maintenance, but many are unsealed and require periodic repacking with grease.
The manufacturer’s recommendations should be followed as to the frequency and grade of grease with which bearings should be packed.
Bearings should be only about 1/3 full to avoid over greasing. To ensure that a bearing is not over greased, excess grease should be allowed to run out of the drain plug for about 10 minutes after starting, and before replacing the grease plug.
Avoid mixing different types of grease as some types are incompatible with others.
Greasing bearings is often regarded in many industries as a low skill job to be relegated to the plant "handy person." Without proper training, the wrong grease can end up being used; the bearings can get under (but mostly over) greased which leads to higher failure rates. Many motor manufacturers have resorted to sealed bearings and permanently lubricated sintered bearings on smaller motors to avoid mistreatment.
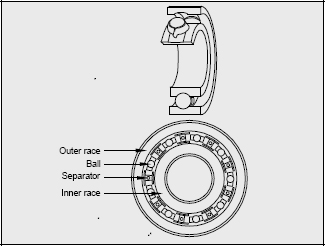
Figure 9-1: Antifriction Bearing
Plain Bearings
Plain bearings are made of a soft material such as bronze or Babbitt (Figure 9-2).
Figure 9-2: Plain Bearing
They cannot support thrust loads, as some antifriction bearings can, and are designed to operate only with horizontal shafts.
Plain bearings are quieter than antifriction bearing types.
Oil is used to lubricate this type of bearing, and supports the moving surfaces with a thin film while they are turning. Operation without sufficient lubrication will cause immediate damage.
An oil ring is often used to transport oil from a reservoir to the top of the shaft. It is a large loose fitting ring with its top half resting on the shaft and its bottom half in the oil reservoir. The action of the oil ring can sometimes be confirmed via a sight plug in the top of the bearing.
The reservoir should be kept filled to the proper level with the correct grade and type of oil. As with grease avoid mixing different types of oil as some are incompatible with others.
Vibration
Excessive vibration can shorten bearing life and reduce motor efficiency.
The driven load should be well balanced and aligned with the motor to minimize vibration.
Vibration can also be a result of worn bearings. Clearance and end play of the bearings and shaft should be measured to determine if bearing replacement is required.
A portable accelerometer can be used to measure vibration of a motor to determine if the balance is acceptable.
NEMA limits on total amplitude of vibration are as follows:
| Motor Synchronous Speed (rpm) | Total Amplitude of Vibration (in) |
|---|---|
| 3000 and above | 0.0010 |
| 1500 – 2999 | 0.0015 |
| 1000 – 1599 | 0.0020 |
| 999 and below | 0.0025 |
Trending of vibration measurements over time is useful for identifying bearing degradation and the need for replacement.
Couplings are available to provide better isolation between the motor and load shafts and are more tolerant of slight misalignment.
Insulation
Motor winding insulation provides electrical separation of both the conductors and mechanical components, and the conductors themselves (Figure 3-1). Insulation is subject to mechanical and electrical stresses, which over time reduce its ability to provide this separation.
High operating temperatures severely affect insulation life.
To maximize insulation life:
- Ventilation screens and shrouds should be kept clean and unobstructed.
- Dirt and grease should be kept off the motor to prevent restriction of heat dissipation.
- Dust and dirt should be vacuumed (preferred) or blown out of open motors.
- Only low pressure (<5 psi), dry, oil-free air should be used to blow out dirt.
Contamination of the windings with oil, grease or chemicals can adversely affect insulation. Totally enclosed motors should be used in areas where contamination can occur.
Moisture can cause insulation systems to fail. If the windings are suspected of being wet or are in areas of high humidity, the insulation resistance should be measured before the motor is energized. Readings less than 1 megohm per kV rating plus 1 megohm indicate the windings should be dried or that the insulation has failed (Table 9 3).
| Rated Voltage | Insulation Resistance |
|---|---|
| 600 Volts and Below | 1.5 Megohm |
| 2300 Volts | 3.5 Megohm |
| 4000 Volts | 5.0 Megohm |
Space heaters can be installed in some motors to prevent moisture buildup when the motor is not operating. The same heating effect can be achieved by applying an AC or DC voltage to one phase of the motor while it is not operating. The voltage level must be determined so that stator temperature is maintained above the dew point of the air.
Polarization index testing is used to determine the condition of the insulation of large (>500 HP) motors.
The polarization index, or P.I., is the ratio of the insulation resistance values taken at two time intervals. The typical P.I. test uses the insulation resistance value at ten minutes compared with the value obtained at one minute.

Where R10 = 10 minute resistance value
R1 = 1 minute resistance value
A polarization index of 2 or more indicates the windings are in acceptable condition.
The Hi-potential or Hipot test is an overvoltage test which determines if a winding has a certain level of insulation strength. Good insulation can withstand voltage levels much higher than the voltages used in Hipot testing.
DC Hipot testing is a good non-destructive, routine test to ensure insulation strength. The voltage level applied for one minute of DC Hipot testing of motors operating at 600 volts or less can be determined as follows:


Where Vtest = DC Hipot test voltage
E = Rated voltage of the motor
AC Hipot testing is used by motor manufacturers and motor repair centres as a pass/fail type of test to determine if there is any weakness in the insulation system. Due to the currents involved in AC Hipot testing, a breakdown of insulation causes permanent damage, so it is considered a destructive test and should not be used as part of a maintenance program.
Periodic maintenance of larger motors includes disassembly, cleaning, hipotting and bearing replacement to ensure longer reliable life. Motors with slip rings or commutators are inspected to ensure wear is not excessive. Additional cleaning and dressing of the commutator or rings may be needed particularly if excessive sparking or discoloration is observed.
VFD Bearing Failure
Occasionally, bearings fail in VFD driven motors due to common mode currents flowing through the motor shaft. This can lead to pitting and eventual failure of the motor bearings. Solutions to the problem include insulating the bearings with ceramic or other non conductive materials to stop the current from traversing the bearing and installation of shaft grounding brushes (Table 9 4) (Ref. 8).
Installing the insulated bearings on the non driven end may be helpful.
Not all motors exhibit this elusive problem. Just knowing that the problem can exist is helpful, should this relatively rare condition occur.
Grounding
One of the largest potential causes of motor bearing damage due to bearing currents is inadequate grounding, especially at high operating frequencies (Ref. 9).
Audible bearing noise is a symptom, but the damage has been done by the time it is noticeable.
| Every VFD Application | Set carrier frequency <6kHz |
| Specify VFD model with carrier | |
| frequency adjustability increments no larger than 1kHz | |
| Shortest possible conductor lengths | |
| Shielded cable with continuous low-impedance ground path from the VFD to the motor | |
| < 25 HP motor | Shaft grounding device |
| 25 HP & larger motor | Insulated motor bearings or ESIM |
| Long lead conductor | Inductive or RCL filter |
| Difficult access to motor | Insulated motor bearings or ESIM |
| Motor bearing failure despite protection | Voltage analysis to locate damaging current loops |
| Noisy motor bearing operation | Vibration analysis to look for signs of EDM in motor bearings |
| Failed motor bearing removed from motor | Inspect motor bearing races for signs of pitting or "fluting" |
Repair or Replace?
The cost of repairing an existing motor is often much less than replacing. However, the number of running hours the motor sees per year will play heavily in the decision to repair or replace. The following example (Table 10 1) illustrates a simple example of an economic analysis.
| Motor Size HP | 40 |
|---|---|
| Existing Motor Efficiency | 87% |
| Premium Motor Efficiency | 94.5% |
| Annual Energy Cost Savings ($0.05/kWh) | $1073 |
| Repair Price – Rewind Only | $1000 |
| New Premium Eff. Motor | $1700 |
| Price Differential | $700 |
| Load Factor | 0.75 |
| Hours/Year | 8000 |
| Simple Payback Months on Differential | ~8.3 |
| Simple Payback Months on Replacement Cost | ~25 |
The motor in this example has a both a high load factor and annual running hours which contribute significantly to the case for replacement with an energy efficient motor. Even replacement of a healthy standard efficiency motor is somewhat attractive; however, the decision to repair is less clear for motors that have few running hours per year. If the motor is a critical piece of equipment, replacement may be a good option in terms of reliability.
If the decision is to repair, exercise caution in selecting a repair facility. For larger motors, it is prudent to request core loss testing of the motor before and after the rewind is performed to ensure that the core has not been damaged. A damaged core will not only have higher losses, but if the damage is localized it may lead to hot spots in the stator core, resulting in a potentially shortened life expectancy. Disassembly and repair of the core would be needed to correct the problem (Ref. 14)
Quality motor repair requires care to be taken at each step. Since modern insulation systems may include epoxies, stripping insulation from the stator core is often a difficult task to perform. Many repair shops bake the core to effectively burn out the old winding so it can be stripped. If the oven temperature is too high, the varnishes used to insulate the laminations could break down. Laminations accidentally peened over could short together resulting in hot spots and increased losses. Using either the wrong gauge of wire or not enough wire, will turns in the slots. For these reasons, it is important to get to know your repair facility and to insist on loss tests being performed. A low cost poor quality rewind may cost more in the long run due to higher run losses and a possible shorter life; however, done properly, even a high efficiency motor can be rewound without incurring any loss in efficiency.
High Efficiency Retrofit
If the decision has been made to replace an existing standard efficiency motor with a high efficiency version, care must be taken to ensure that the result will in fact yield actual savings. Done incorrectly, the new motor could, in some instances, consume more energy than the old motor. That is not to say the new motor is less efficient, but rather the new motor load combination performs differently than the old combination. This can result in more work being done when the increase is not needed. Therefore when changing a motor, ensure the load is adjusted to match the new motor.
Motor Resizing
A common practice was (and still is) to oversize a motor to be sure it is capable of driving the load. An oversized motor is less efficient and contributes to a lower power factor. For variable loads, ensure the motor never exceeds its full load or service factor rating.
Speed Adjustments
Energy efficient motors typically operate at lower slip than standard efficiency motors. This means for a variable torque load, an energy efficient motor will operate at a higher RPM at the balance point and will consume more energy. To correct this problem, the pulley ratio between the motor and load need to be adjusted for belt drives.
Load Adjustments
For direct coupled variable torque loads, an energy efficient motor will tend to run faster as noted in the previous subsection. For these situations the load will need to be adjusted. Examples include changing fan pitch or trimming pump impellers. This requires special skills to accomplish.
Power Factor
Energy efficient motors typically have higher power factors than standard efficiency motors. Existing power factor correction capacitors will need to be re-evaluated to ensure overcorrection is not occurring.
Recommended Web Links
Tools and resources listing organizations & programs, software and literature:
- Natural Resources Canada - Introduction page for “CanMOST” The Canadian Motor Selection Tool
- NEMA Premium Motors
http://www.nema.org/gov/energy/efficiency/premium/ - US Department of Energy – Appliance & Equipment Standards
http://www.eere.energy.gov/buildings/appliance_standards/notices_rules.html - Copper Motor Rotor Project - Using copper as a rotor material to improve efficiency
http://www.copper.org/applications/electrical/motor-rotor/index.html - Motor Decisions Matter - A national campaign encouraging the use of sound motor management and planning as a tool to cut motor energy costs and increase productivity
http://www.motorsmatter.org/ - BC Hydro Power Smart - Electric Motors
http://www.bchydro.com/powersmart/business/industrial.html - Electrical Apparatus Service Association, Inc. - The Effect of Repair / Rewinding on Motor Efficiency EASA/AEMT Rewind Study and Good Practice Guide to Maintain Motor Efficiency - EASA 2003
www.easa.com
Glossary
|
Air Gap |
The space between the rotating (rotor) and stationary (stator) member in an electric motor. |
|
Altitude |
The atmospheric altitude (height above sea level) at which the motor will be operating; NEMA standards call for an altitude not exceeding 3,300 ft. (1,000 meters). As the altitude increases above 3,300 ft. and the air density decreases, the air’s ability to cool the motor decreases - for higher altitudes higher grades of insulation or a motor derating are required. DC motors require special brushes for high altitudes (Ref. 18). |
|
Ambient Temperature |
The temperature of the surrounding cooling medium, such as gas or liquid, which comes into contact with the heated parts of the motor. The cooling medium is usually the air surrounding the motor. The standard NEMA rating for ambient temperature is not to exceed 40oC. |
|
Anti-Friction Bearing |
An anti-friction bearing is a bearing utilizing rolling elements between the stationary and rotating assemblies |
|
Armature |
The portion of the magnetic structure of a DC or universal motor which rotates. |
|
Breakdown Torque |
The maximum torque a motor will develop at rated voltage without a relatively abrupt drop or loss in speed. |
|
Brush |
A piece of current conducting material (usually carbon or graphite) which rides directly on the commutator of a commutated motor and conducts current from the power supply to the armature windings. |
|
Capacitance |
Capacitance is that property of a system of dielectrics and conductors that allows for the storage of electrically separated charges when a potential difference exists between the conductors. A capacitor does not dissipate real energy (watts). |
|
Commutator |
A cylindrical device mounted on the armature shaft and consisting of a number of wedge-shaped copper segments arranged around the shaft (insulated from it and each other. The motor brushes ride on the periphery of the commutator and electrically connect and switch the armature coils to the power source. |
|
Constant Horsepower |
Describes a load which decreases with increasing speed. Common applications are variable speed processes that are changing diameters such as lathes, winders, unwinders, and metal-cutting tools. With an initial large diameter work piece, maximum torque and slow speeds are required. |
|
Constant Torque |
Describes a load where the torque required is constant throughout the speed range e.g. a friction load. Friction loads require the same amount of torque at low speeds as at high speeds. The horsepower requirement, however, increases with speed. Common applications include general machinery, hoists, conveyors, etc. |
|
CSA |
Canadian Standards Association |
|
Drip-Proof Motor |
An open motor in which the ventilating openings are so constructed that drops of liquid or solid particles falling on it, at any angle not greater than 15 degrees from the vertical, cannot enter either directly or by striking and running along a horizontal or inwardly inclined surface. |
|
Duty Cycle |
The relationship between the operating and rest times or repeatable operation at different loads. A motor which can continue to operate within the temperature limits of its insulation system, after it has reached normal operating (equilibrium) temperature is considered to have a continuous duty (CONT.) rating. One which never reaches equilibrium temperature, but is permitted to cool down between operations is operating under intermittent duty (INT.) conditions such as a crane and hoist motor which are often rated 15 or 30 min. duty. |
|
Eddy Currents |
Localized currents induced in an iron core by alternating magnetic flux. These currents translate into losses (heat) and their minimization is an important factor in lamination design. |
|
Efficiency |
The efficiency of a motor is the ratio of mechanical output to electrical input. It represents the effectiveness with which the motor converts electrical energy into mechanical energy. |
|
Fractional-Horsepower Motor |
A motor usually built in a frame smaller than that having a continuous rating of one horsepower, open construction, at 1700 -1800 rpm. |
|
Full-Load Current |
The current flowing through the line when the motor is operating at full-load torque and full-load speed with rated frequency and voltage applied to the motor terminals. |
|
Full-Load Torque |
That torque of a motor necessary to produce its rated horsepower at full-load speed, sometimes referred to as running torque. |
|
Hertz (Hz) |
One cycle per second (as in 60 Hz. which is 60 cycles per second). |
|
Horsepower |
The measure of rate of work. One horsepower is equivalent to lifting 33,000 pounds to a height of one foot in one minute. The horsepower of a motor is expressed as a function of torque and rpm.  where: HP = horsepower, T = torque (in. lb.ft.), and RPM = revolutions per minute. |
|
Hysterisis |
A lagging of the resulting magnetization in a ferromagnetic material caused by a changing magnetic field. |
|
Hysterisis Loss |
The resistance to becoming magnetized (magnetic orientation of molecular structure) offered by materials results in energy being expended and corresponding loss. Hysterisis loss in a magnetic circuit is the energy expended to magnetize and demagnetize the core. |
|
IEC |
International Electrotechnical Commission |
|
IEEE |
Institute of Electrical and Electronic Engineers |
|
Impedance |
Propensity of a circuit or device to impede the flow of current. |
|
Inductance |
Represents the propensity of a conductor to store energy in an associated magnetic field. |
|
Induction Motor |
An induction motor is an alternating current motor in which the primary winding on one member (usually the stator) is connected to the power source and a secondary winding or a squirrel-cage secondary winding on the other member (usually the rotor) carries the induced current. There is no physical electrical connection to the secondary winding, its current is induced. |
|
Inertial Load |
A load (flywheel, fan, etc.) which tends to cause the motor shaft to continue to rotate after the power has been removed (stored kinetic energy). If this continued rotation cannot be tolerated, some mechanical or electrical braking is needed. This application may require a special motor due to the energy required to accelerate the inertia. |
|
Insulation Class |
Since there are various ambient temperature conditions a motor might see and different temperature ranges within which motors run and insulation is sensitive to temperature; motor insulation is classified by the temperature ranges at which it can operate for a sustained period of time. |
|
Inverter |
An electronic device that converts fixed frequency and voltage to variable frequency and voltage. |
|
JEC |
Japanese Electrotechnical Committee |
|
Laminations |
The steel portion of the rotor and stator cores made up of a series of thin laminations (sheets) which are stacked and fastened together by cleats, rivets or welds. Laminations are used instead of a solid piece in order to reduce eddy-current losses. |
|
Magnetic Field |
The portion of space near a current-carrying body or a magnetic body in which a voltage can be induced in a second current carrying body when the state of changes or when the second current-carrying body moves in prescribed ways relative to the medium. |
|
Magnetic Flux |
The integral over a specified surface of the component of magnetic induction perpendicular to the surface. |
|
Magnetic Pole |
The portions of a magnet which appear to generate or absorb the flow of the external magnetic induction. |
|
NEMA |
National Electrical Manufacturers Association is a non-profit organization organized and supported by manufacturers of electric equipment and supplies. NEMA has set standards on: HP ratings, Speeds, frame sizes and dimensions, standard voltages and frequencies with allowable variations, service factors, torques, starting current & kVA, enclosures |
|
Power Factor |
The ration of total watts to the total root mean square (RMS) volt-Amperes  |
|
PWM |
Pulse Width Modulation – when applied to a variable speed drive, the inverter adjusts both the width of the output voltage pulses as well as the frequency to improve the sinusoidal shape of the output voltage waveform. |
|
Reactance |
The opposition to the flow of alternating current by the inductance or capacitance of a component or circuit. |
|
Rectifier |
A rectifier is a device which may be used to convert alternating current to direct current (by conducting current easily in one direction and negligibly in the opposite direction). |
|
Resistance |
A physical property of a circuit that impedes the flow of current. For AC circuits, resistance limits the current which is in phase with the voltage. When current flows through a resistance, a voltage drop develops across the resistance (Ohm’s Law). |
|
Retentivity |
The capacity to retain magnetism after the magnetizing action has ceased. |
|
Service Factor |
When used on a motor nameplate, a number which indicates how much above the nameplate rating a motor can be loaded without causing serious degradation, (i.e., a 1.15 S-F can produce 15% greater torque than the 1.0 S-F rating of the same motor). |
|
Slip |
The ration of the difference between the synchronous speed and the actual speed of the rotor to the synchronous speed of the rotor.  |
|
Slip Ring |
Continuous conducting rings on the rotor from which brushes conduct current into or out of the motor. |
|
Standards |
ANSI - American National Standards Institute |
|
Synchronous Speed |
The speed of the rotation of the magnetic flux produced by the stator windings. |
|
Temperature Rise |
Each NEMA temperature code has an associated temperature rise which when added to the ambient and hot spot should not exceed the temperature handing of the insulation system |
|
UL |
Underwriter’s Laboratories (the UL approval mark with a subscripted letter “C” indicates the device has been tested by UL to Canadian Standards). |
|
Variable Torque |
Variable torque loads increase torque with speed and are usually associated with centrifugal fan and pump loads, where, in theory, the horsepower requirement varies as the cube of the speed change. Variable torque loads provide the greatest savings potential for VFD’s. |
Bibliography
- "Motors Reference Guide," 3rd Edition, Ontario Hydro, August 1997. (Basic motor theory and other currently relevant information were derived from this guide with the permission of the present copyright holder, Ontario Power Generation).
- Lawrie, Robert J., "Electric Motor Manual", McGraw Hill, 1987.
- "Written Pole Single Phase Motors," Precise Power. http://www.precisepwr.com/single_phase_motors.asp?bhcp=1
- "Linear DC Motors," Electric Motors Reference Center. http://www.electricmotors.machinedesign.com
/guiEdits/Content/bdeee3/bdeee3_7.aspx - "Hybrid Step Motor," National Instruments. http://zone.ni.com/devzone/cda/ph/p/id/287#toc3
- Smeaton, Robert W. "Motor Application & Maintenance Handbook," 2nd Edition, 1987.
- "CanMOST - The Canadian Motor Selection Tool," Natural Resources Canada.
- "Are Bearing Currents Causing Your Motor Failures?" Engineering Update, Greenheck Fan Corporation, Volume 6, Issue 1, Spring 2004.
- Spear, Mike, "Get A Fix on ASD Problems, - Adjustable Speed Drives Sometimes May Harm Bearings and Lubricants," Chemical Processing, December, 2005.
- "Motor Decisions Matter," Consortium for Energy Efficiency. http://www.motorsmatter.org/
- "NEMA Premium Motors," National Electrical Manufacturers Association. http://www.nema.org/gov/energy/efficiency/premiu/
- "Best Practices on Motors , Pumps and Fans" U.S. Department of Energy.
- "The Effect of Repair / Rewinding on Motor Efficiency EASA/AEMT Rewind Study and Good Practice Guide to Maintain Motor Efficiency," EASA 2003. www.easa.com
- "Laboratory Testing Of The Magnadrive Adjustable-Speed Coupling Systems (ASCS)," Motor Systems Resource Facility (MSRF), Oregon State University, January, 2000.
- "Appliance & Equipment Standards," U.S. Department of Energy. http://www.eere.energy.gov/buildings/appliance_standards/notices_rules.html
- "Energy-Efficient Motor Systems Assessment Guide," Natural Resources Canada, 2004.
- "Motor Terms," Rockwell Automation, 2005.
- Brunner, Conrad U, "Motor Efficiency Standards SEEEM Harmonization Initiative", IEA Electric Motor Systems Workshop, Paris, 15-16 May 2006
- Little, Arthur, "Opportunities for Energy Savings in the Residential and Commercial Sectors with High-Efficiency Electric Motors," U.S. Department of Energy, December, 1999.
- "Analysis of Energy Conservation Standards for Small Electric Motors," Building Technologies Office of Energy Efficiency and Renewable Energy, U.S. Department of Energy, June 2003.
- "When to Purchase NEMA Premium™ Efficiency Motors - Motor Systems Tip Sheet #1," U.S. Department Of Energy Publication, September 2005.
- "Energy Management Guide for Selection and Use of Single-Phase Motors," National Electrical Manufacturers Association Standards Publication MG11-2001.
Your feedback and comments are appreciated.
Please provide suggestions to: info@ceati.com
Page details
- Date modified: