
Polarimetric Image Interpretation
One of the main objectives of remote sensing is to make a thematic map of the Earth's surface, indicating the type of material at each location imaged by the radar. The type of material can be estimated from the polarimetric radar data, using a computer-based classification algorithm. Pixels or groups of pixels are assigned to terrain classes that have a meaningful geoscientific interpretation.
In the case of polarimetric radar, a larger number of parameters can be measured compared to a single-channel radar. This should make it possible to achieve a more accurate image classification. However, measurement noise, system calibration difficulties, the understanding of scattering mechanisms and the mixing of many different scattering mechanisms in one pixel or group of pixels are obstacles that must be overcome to obtain an accurate classification. The issues of calibration and image interpretation are addressed in this section. Details of classification algorithms are given in Section 7.
6.1 Data Calibration
One of the critical requirements of polarimetric radar systems is the need for calibration. This is because much of the information lies in the ratios of amplitudes and the differences in phase angle between the backscattering in the four received polarization combinations. If the calibration is not sufficiently accurate, the scattering mechanisms will be misinterpreted and the advantages of using multiple polarizations will be lost.
Calibration is achieved by a combination of radar system design and analysis of the received data. Consider the response to a trihedral corner reflector shown in Figure 6-1. This ideal response is represented by the identity scattering matrix:
![]()
and is only obtained if the four channels all have the same gain, the phase differences between channels are corrected to zero, there is no energy leakage from one channel to another (crosstalk), and there is no receiver noise. Even if the radar system does not have these ideal properties, if the imbalances can be measured, they can be largely corrected by calibration procedures.
In terms of the radar design, the channel gains and phases should be as carefully matched as possible. In the case of the phase balance, this means that the signal path lengths should be effectively the same in all channels. Calibration signals are usually built into the system design to measure the channel balances.
In terms of data analysis, channel balances (amplitude and phase), crosstalk and noise can be measured and corrected by analyzing the data received from specific targets. In addition to analyzing the response of internal calibration signals, the signals from known targets such as corner reflectors, active transponders, uniform clutter and radar shadow can be used to calibrate some of the parameters.
Many different calibration procedures have been developed, some sensor-specific ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() . One of the common difficulties is that the calibration parameters tend to vary with beam elevation angle (because of antenna properties) and with incidence angle (because of scattering properties), which means that the calibration procedure has to account for range variations in the scene.
. One of the common difficulties is that the calibration parameters tend to vary with beam elevation angle (because of antenna properties) and with incidence angle (because of scattering properties), which means that the calibration procedure has to account for range variations in the scene.
In addition to compensating for system imbalances, there are the calibration issues of interpreting absolute gain values, and the geometric location of the processed samples. Traditionally, corner reflectors and active radar calibrators (ARCs) are deployed on the ground for these purposes. For geometric location, a simple, economical wire mesh reflector can be used (see Figure 6-1). But for precise gain measurement, a corner reflector with close structural tolerances or an ARC are generally used (see Figure 6-2).
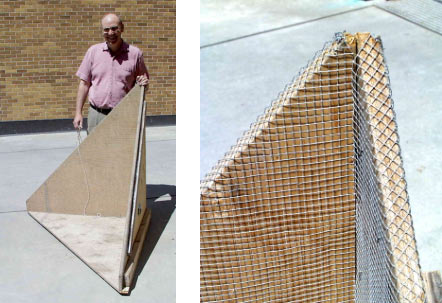
Figure 6-1: A wire mesh 1.4 meter corner reflector used for geometric calibration. The internal surfaces meet at 90°, and are covered by a conducting mesh to create a strong backscatter. CCRS calibration specialist, Bob Hawkins is the proud father.

Figure 6-2: Small (40 cm) and large (140 cm) trihedral corner reflectors used by CCRS for radar calibration. Larger reflectors are needed at lower frequencies, as the reflector gain is proportional to the square of the radar frequency. (source: CCRS)
Page details
- Date modified: